Deep learning
Deep learning models can be seen as a subset of machine learning models, typically based on artificial neural networks. Using deep learning models for point cloud processing often demands top-level hardware. Users interested in these models are strongly encouraged to have a computer with no less than \(128\,\mathrm{GB}\) of RAM, a manycore processor (with many real cores for efficient parallel processing), and a top-level coprocessor like a GPU or a TPU. It is worth mentioning that training deep learning models for dense point clouds is not feasible with a typical CPU, so the coprocessor is a must. However, using an already trained deep learning model might be possible without a coprocessor, provided the system has a top-level CPU and high amounts of RAM.
The deep learning models in the VL3D framework are based on the strategy represented in the figure below. First, it is necessary to select a set of neighborhoods that represents the input point cloud. These can overlap between themselves, i.e., the same point can be in more than one neighborhood. The neighborhoods can be defined as spheres, voxels, cylinders, or many more. Now, note that each neighborhood can contain a different number of points. In the VL3D framework, the input neighborhoods must be transformed into fixed-size representations (in terms of the number of points) that will be later grouped into batches to be fed into the neural network.
Once the neural network has computed the output, it will be propagated back from the fixed-size receptive fields to the original neighborhoods, for example, through a nearest-neighbor strategy. As there might be many outputs for the same point, the values in the neighborhoods are aggregated (also reduced), so there is one final value per point in the original point cloud (provided that the input neighborhoods cover the entire point cloud).
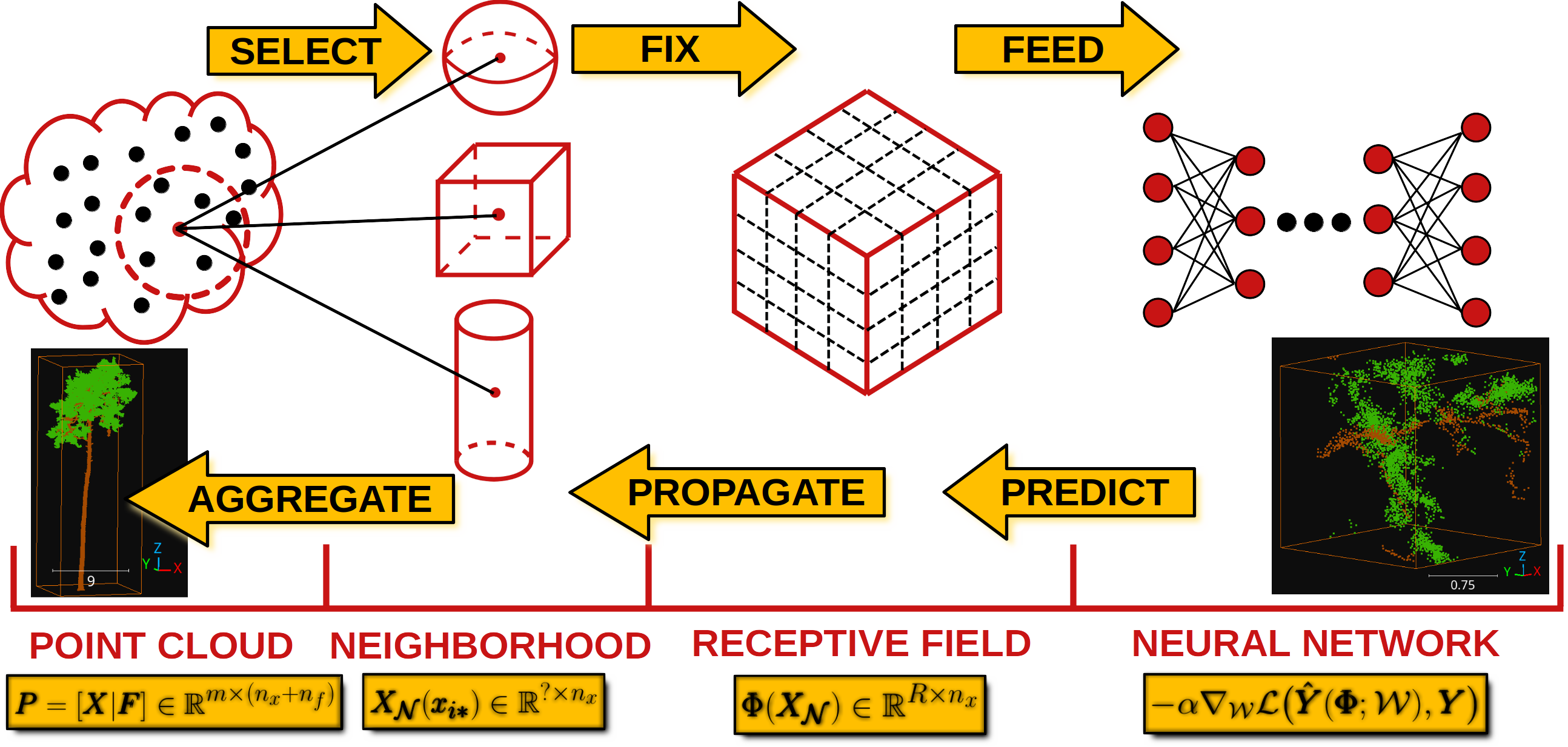
Visualization of the deep learning strategy used by the VL3D framework.
The VL3D framework uses Keras and TensorFlow as the deep learning backend. The usage of deep learning models is documented below. However, for this documentation users are expected to be already familiar with the framework, especially with how to define pipelines. If that is not the case, we strongly encourage you to read the documentation about pipelines before.
Models
PointNet-based point-wise classifier
The PointNetPwiseClassif can be used to solve point-wise classification
tasks. This model is based on the PointNet architecture and it can be defined
as shown in the JSON below:
{
"train": "PointNetPwiseClassifier",
"fnames": ["AUTO"],
"training_type": "base",
"random_seed": null,
"model_args": {
"num_classes": 5,
"class_names": ["Ground", "Vegetation", "Building", "Urban furniture", "Vehicle"],
"num_pwise_feats": 16,
"pre_processing": {
"pre_processor": "furthest_point_subsampling",
"to_unit_sphere": false,
"support_strategy": "grid",
"support_chunk_size": 2000,
"support_strategy_fast": false,
"_training_class_distribution": [1000, 1000, 1000, 1000, 1000],
"center_on_pcloud": true,
"num_points": 4096,
"num_encoding_neighbors": 1,
"fast": false,
"neighborhood": {
"type": "rectangular3D",
"radius": 5.0,
"separation_factor": 0.8
},
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": "*/training_eval/training_receptive_fields/",
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"receptive_fields_dir": "*/training_eval/receptive_fields/",
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"kernel_initializer": "he_normal",
"pretransf_feats_spec": [
{
"filters": 32,
"name": "prefeats32_A"
},
{
"filters": 32,
"name": "prefeats_32B"
},
{
"filters": 64,
"name": "prefeats_64"
},
{
"filters": 128,
"name": "prefeats_128"
}
],
"postransf_feats_spec": [
{
"filters": 128,
"name": "posfeats_128"
},
{
"filters": 256,
"name": "posfeats_256"
},
{
"filters": 64,
"name": "posfeats_end_64"
}
],
"tnet_pre_filters_spec": [32, 64, 128],
"tnet_post_filters_spec": [128, 64, 32],
"final_shared_mlps": [512, 256, 128],
"skip_link_features_X": false,
"include_pretransf_feats_X": false,
"include_transf_feats_X": true,
"include_postransf_feats_X": false,
"include_global_feats_X": true,
"skip_link_features_F": false,
"include_pretransf_feats_F": false,
"include_transf_feats_F": true,
"include_postransf_feats_F": false,
"include_global_feats_F": true,
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [0.25, 0.5, 0.5, 1, 1],
"training_epochs": 200,
"batch_size": 16,
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
},
"early_stopping": {
"monitor": "loss",
"mode": "min",
"min_delta": 0.01,
"patience": 5000
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
}
},
"compilation_args": {
"optimizer": {
"algorithm": "SGD",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"training_activations_path": "*/training_eval/activations.las"
}
The JSON above defines a PointNetPwiseClassif that uses a
furthest point subsampling strategy with a 3D rectangular neighborhood. The
optimization algorithm to train the neural network is stochastic gradient
descent (SGD). The loss function is a categorical cross-entropy that accounts
for class weights. The class weights can be used to handle data imbalance.
Arguments
- –
fnames The names of the features that must be considered by the neural network.
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.- –
random_seed Can be used to specify an integer like seed for any randomness-based computation. Mostly to be used for reproducibility purposes. Note that the initialization of a neural network is often based on random distributions. This parameter does not affect those distributions, so it will not guarantee reproducibility for of deep learning models.
- –
model_args The model specification.
- –
fnames If the input to the model involves features, their names must be given again inside the
model_argsdictionary due to technical reasons.- –
num_classess An integer specifying the number of classes involved in the point-wise classification tasks.
- –
class_names The names of the classes involved in the classification task. Each string corresponds to the class associated to its index in the list.
- –
num_pwise_feats How many point-wise features must be computed.
- –
pre_processing How the select and fix stages of the deep learning strategy must be handled. See the receptive fields section for further details.
- –
kernel_initializer The name of the kernel initialization method. See Keras documentation on layer initializers for further details.
- –
pretransf_feats_spec A list of dictionaries where each dictionary defines a layer to be placed before the transformation block in the middle. Each dictionary must contain
filters(an integer specifying the output dimensionality of the layer) andname(a string representing the layer’s name).- –
postransf_feats_spec A list of dictionaries where each dictionary defines a layer to be placed after the transformation block in the middle. Each dictionary must contain
filters(an integer specifying the output dimensionality of the layer) andname(a string representing the layer’s name).- –
tnet_pre_filters_spec A list of integers where each integer specifies the output dimensionality of a convolutional layer placed before the global pooling.
- –
tnet_post_filters_spec A list of integers where each integer specifies the output dimensionality of a dense layer (MLP) placed after the global pooling.
- –
final_shared_mlps A list of integers where each integer specifies the output dimensionality of the shared MLP (i.e., 1D Conv with unitary window and stride). These are called final because they are applied immediately before the convolution that reduces the number of point-wise features that constitute the input of the final layer.
- –
skip_link_features_X Whether to propagate the input structure space to the final concatenation of features (True) or not (False).
- –
include_pretransf_feats_X Whether to propagate the values of the hidden layers that processed the structure space before the second transformation block to the final concatenation of features (True) or not (False).
- –
include_transf_feats_X Whether to propagate the values of the hidden layers that processed the structure space in the second transformation block to the final concatenation of features (True) or not (False).
- –
include_postransf_feats_X Whether to propagate the values of the hidden layers that processed the structure space after the second transformation block to the final concatenation of features (True) or not (False).
- –
include_global_feats_X Whether to propagate the global features derived from the structure space to the final concatenation of features (True) or not (False).
- –
skip_link_features_F Whether to propagate the input feature space to the final concatenation of features (True) or not (False).
- –
include_pretransf_feats_F Whether to propagate the values of the hidden layers that processed the feature space before the second transformation block to the final concatenation of features (True) or not (False).
- –
include_transf_feats_F Whether to propagate the values of the hidden layers that processed the feature space in the second transformation block to the final concatenation of features (True) or not (False).
- –
include_postransf_feats_F Whether to propagate the values of the hidden layers that processed the feature space after the second transformation block to the final concatenation of features (True) or not (False).
- –
include_global_feats_F Whether to propagate the global features derived from the feature space to the final concatenation of features (True) or not (False).
- –
features_structuring_layerEXPERIMENTAL Specification for the
FeaturesStructuringLayerthat uses radial basis functions to transform the features. This layer is experimental and it is not part of typical PointNet-like architectures. Users are strongly encouraged to avoid using this layer. At the moment it is experimental and should only be used for development and research purposes.
- –
- –
architecture_graph_pathPath where the plot representing the neural network’s architecture wil be exported.
- –
architecture_graph_argsArguments governing the architecture’s graph. See Keras documentation on plot_model for further details.
- –
model_handlingDefine how to handle the model, i.e., not the architecture itself but how it must be used.
- –
summary_report_pathPath where a text describing the built network’s architecture must be exported.
- –
training_history_dirPath where the data (plots and text) describing the training process must be exported.
- –
class_weightThe class weights for the model’s loss. It can be
nullin which case no class weights will be considered. Alternatively, it can be"AUTO"to automatically compute the class weights based on TensorFlow’s imbalanced data tutorial. It can also be a list with as many elements as classes where each element governs the class weight for the corresponding class.- –
training_epochsHow many epochs must be considered to train the model.
- –
batch_sizeHow many receptive fields per batch must be grouped together as input for the neural network.
- –
checkpoint_pathPath where a checkpoint of the model’s current status can be exported. When given, it will be used during training to keep the best model. The extension of the file must be necessarily
".weights.h5".- –
checkpoint_monitorWhat metric must be analyzed to decide what is the best model when using the checkpoint strategy. See the Keras documentation on ModelCheckpoint for more information.
- –
learning_rate_on_plateauWhen given, it can be used to configure the learning rate on plateau callback. See the Keras documentation on ReduceLROnPlateau for more information.
- –
early_stoppingWhen given, it can be used to configure the early stopping callback. See the Keras documentation on EarlyStopping for more information.
- –
prediction_reducerCan be used to modify the default prediction reduction strategies. It is a dictionary that supports a
"reduce_strategy"specification and also a"select_strategy"specification.
- –
reduce_strategySupported types are
SumPredReduceStrategy,MeanPredReduceStrategy(default),MaxPredReduceStrategy, andEntropicPredReduceStrategy.- –
select_strategySupported types are
ArgMaxPredSelectStrategy(default).- –
fit_verboseWhether to use silent mode (0), show a progress bar (1), or print one line per epoch (2) when training a model. Alternatively,
"auto"can be used, which typically means (1).- –
predict_verboseWhether to use silent mode (0), show a progress bar (1), or print one line per epoch (2) when using a model to predict. Alternatively,
"auto"can be used, which typically means (1).
- –
compilation_argsThe arguments governing the model’s compilation. They include the optimizer, the loss function and the metrics to be monitored during training. See the optimizers section and losses section for further details.
- –
training_evaluation_metrics What metrics must be considered to evaluate the model on the training data.
"OA"Overall accuracy."P"Precision."R"Recall."F1"F1 score (harmonic mean of precision and recall)."IoU"Intersection over union (also known as Jaccard index)."wP"Weighted precision (weights by the number of true instances for each class)."wR"Weighted recall (weights by the number of true instances for each class)."wF1"Weighted F1 score (weights by the number of true instances for each class)."wIoU"Weighted intersection over union (weights by the number of true instances for each class)."MCC"Matthews correlation coefficient."Kappa"Cohen’s kappa score.
- –
training_class_evaluation_metrics What class-wose metrics must be considered to evaluate the model on the training data.
"P"Precision."R"Recall."F1"F1 score (harmonic mean of precision and recall)."IoU"Intersection over union (also known as Jaccard index).
- –
training_evaluation_report_path Path where the report about the model evaluated on the training data must be exported.
- –
training_class_evaluation_report_path Path where the report about the model’s class-wise evaluation on the training data must be exported.
- –
training_confusion_matrix_report_path Path where the confusion matrix must be exported (in text format).
- –
training_confusion_matrix_plot_path Path where the confusion matrix must be exported (in image format).
- –
training_class_distribution_report_path Path where the analysis of the classes distribution must be exported (in text format).
- –
training_class_distribution_plot_path Path where the analysis of the classes distribution must be exported (in image format).
- –
training_classifier_point_cloud_path Path where the training data with the model’s predictions must be exported.
- –
training_activations_path Path where a point cloud representing the point-wise activations of the model must be exported. It might demand a lot of memory. However, it can be useful to understand, debug, and improve the model.
Hierarchical autoencoder point-wise classifier
Hierarchical autoencoders for point-wise classification are available in the
framework through the ConvAutoencPwiseClassif architecture. They are
also referred to in the documentation as convolutional autoencoders. In the
scientific literature they are widely known as hierarchical feature extractors
too. The figure below summarized the main logic of hierarchical autoencoders
for point clouds.
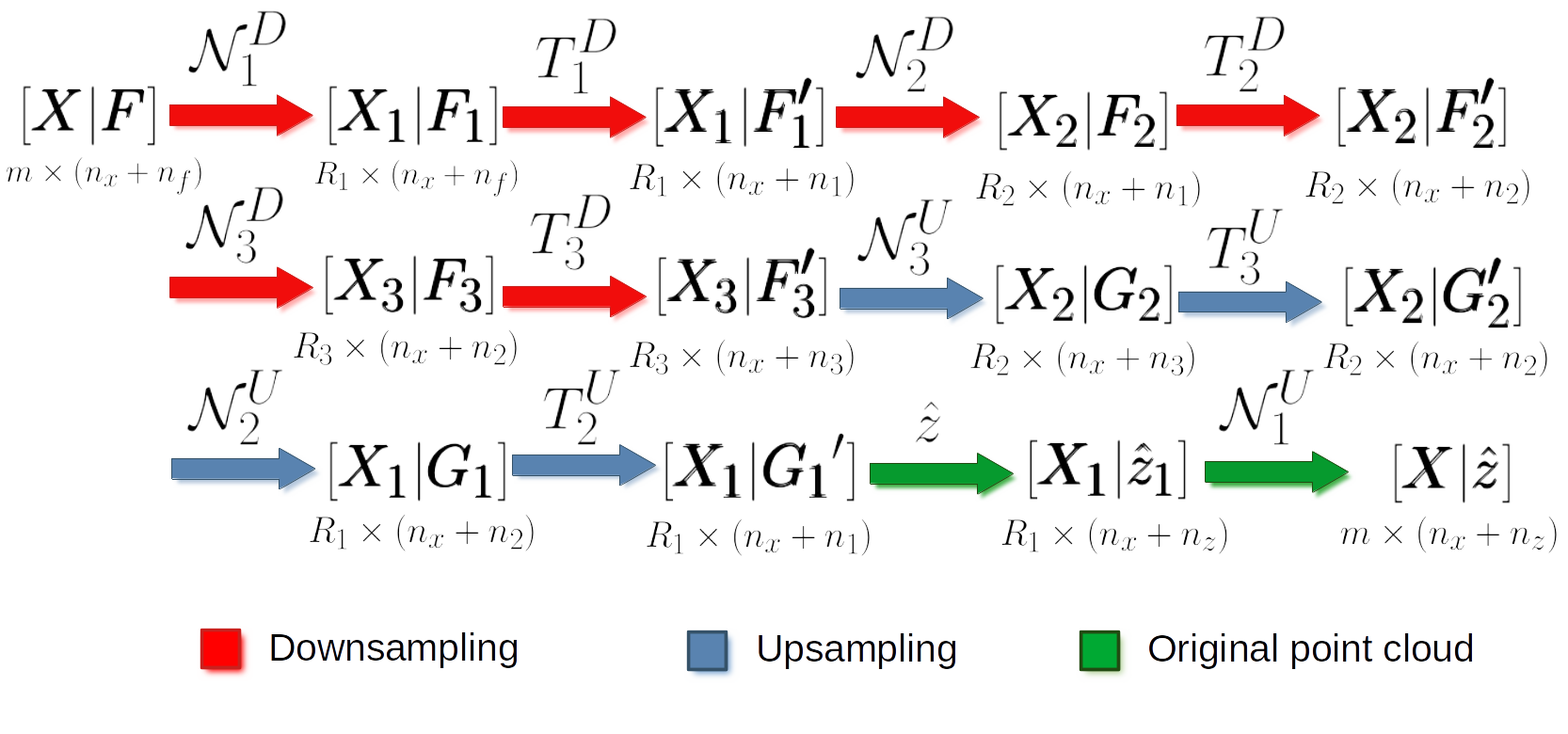
Representation of the main logic governing hierarchical autoencoders for point clouds based on hierarchical receptive fields.
Initially, we have a 3D structure space \(\pmb{X} \in \mathbb{R}^{m \times 3}\) with \(m\) points and the corresponding feature space \(\pmb{F} \in \mathbb{R}^{m \times n_f}\) with \(n_f\) features. For a given depth, for example for depth three (as illustrated in the figure above), there is a set of downsampling stages followed by a set of upsampling stages.
At a given depth \(d\), there is a non downsampled structure space \(\pmb{X_{d-1}} \in \mathbb{R}^{R_{d-1} \times 3}\) and its corresponding \(\pmb{X_{d}} \in \mathbb{R}^{R_d \times 3}\) downsampled version. The neighborhood \(\mathcal{N}_d^D\) can be represented with an indexing matrix \(\pmb{N}_{d}^{D} \in \mathbb{Z}^{R_d \times \kappa_d^D}\) that defines for each of the \(R_d\) points in the downsampled space its \(\kappa_d^D\) closest neighbors in the non downsampled space.
Once in the downsampling space, a transformation \(T_d^D\) is applied to downsampled feature space to obtain a new set of features. This transformation can be done using different operators like PointNet or Kernel Point Convolution (KPConv). Further details about them will be given below in the hierarchical feature extraction with PointNet and the hierarchical feature extraction with KPConv sections.
After finishing the downsampling and feature extraction operations, it is time to restore the original dimensionality through upsampling. First, the \(\mathcal{N}_d^U\) neighborhood is reresented by an indexing matrix \(\pmb{N}_{d}^U \in \mathbb{Z}^{R_{d-1} \times \kappa_d^U}\) that defines for each of the \(R_{d-1}\) points in the upsampled space its \(\kappa_d^U\) closest neighbors in the non upsampled space. Then, the \(T_d^U\) upsampling operation is applied. Typically, it is a SharedMLP (i.e., a unitary 1D discrete convolution).
Note that the last upsampling operation is not applied inside the neural network. Instead, the estimations of the network are computed on the first receptive field with structure space \(\pmb{X_1} \in \mathbb{R}^{R_1 \times 3}\) (the one with more points, and thus, closer to the original neighborhood). Finally, the last upsampling is computed to transform the predictions of the neural network (\(\hat{z}\)) back to the original input neighborhood (with an arbitrary number of points).
Hierarchical feature extraction with PointNet
The ConvAutoencPwiseClassif architecture can be configured with
PointNet for feature extraction operations. The downsampling strategy can be
defined through the FeaturesDownsamplingLayer, the upsampling
strategy through the FeaturesUpsamplingLayer, and the feature
extraction through the GroupingPointNetLayer. The JSON below
illustrates how to configure PointNet++-like hierarchical feature extractors
using the VL3D framework. For further details on the original PointNet++
architecture, readers are referred to
the PointNet++ paper (Qi et al., 2017)
.
{
"in_pcloud": [
"/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/data/Mar18_train.laz"
],
"out_pcloud": [
"/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/vl3d/hae_X_FPS50K/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["AUTO"],
"random_seed": null,
"model_args": {
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 50000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 2000,
"support_strategy_fast": true,
"center_on_pcloud": true,
"neighborhood": {
"type": "rectangular3D",
"radius": 3.0,
"separation_factor": 0.8
},
"num_points_per_depth": [512, 256, 128, 64, 32],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 8, 8, 4],
"num_pwise_neighbors": [32, 16, 16, 8, 4],
"num_upsampling_neighbors": [1, 16, 8, 8, 4],
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"receptive_fields_dir": null,
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"feature_extraction": {
"type": "PointNet",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.0,
"H_activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"H_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"H_regularizer": [null, null, null, null, null, null],
"H_constraint": [null, null, null, null, null, null],
"gamma_activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"gamma_kernel_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"gamma_kernel_regularizer": [null, null, null, null, null, null],
"gamma_kernel_constraint": [null, null, null, null, null, null],
"gamma_bias_enabled": [true, true, true, true, true, true],
"gamma_bias_initializer": ["zeros", "zeros", "zeros", "zeros", "zeros", "zeros"],
"gamma_bias_regularizer": [null, null, null, null, null, null],
"gamma_bias_constraint": [null, null, null, null, null, null]
},
"_structure_alignment": {
"tnet_pre_filters_spec": [64, 128, 256],
"tnet_post_filters_spec": [128, 64, 32],
"kernel_initializer": "glorot_normal"
},
"features_alignment": null,
"downsampling_filter": "gaussian",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.0,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"features_structuring_representation_dir": "*/training_eval/feat_struct_layer/",
"class_weight": [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
"training_epochs": 200,
"batch_size": 16,
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "SGD",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 15000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*pipe/HAE_T1.pipe",
"include_writer": false,
"include_imputer": false,
"include_feature_transformer": false,
"include_miner": false,
"include_class_transformer": false
}
]
}
The JSON above defines a ConvAutoencPwiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D rectangular
neighborhood and the PointNet operator for feature extraction. It is expected
to work only on the structure space, i.e., the input feature space will be a
single column of ones.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.- –
fnames The name of the features that must be given as input to the neural network. For hierarchical autoencoders this list can contain
"ones"to specify whether to include a column of ones in the input space matrix. This architecture does not support empty feature spaces as input, thus, when no features are given, the input feature space must be represented with a column of ones.- –
random_seed Can be used to specify an integer like seed for any randomness-based computation. Mostly to be used for reproducibility purposes. Note that the initialization of a neural network is often based on random distributions. This parameter does not affect those distributions, so it will not guarantee reproducibility for of deep learning models.
- –
model_args The model specification.
- –
num_classess An integer specifying the number of classes involved in the point-wise classification tasks.
- –
class_names The names of the classes involved in the classification task. Each string corresponds to the class associated to its index in the list.
- –
pre_processing How the select and fix stages of the deep learning strategy must be handled. Note that hierarchical autoencoders demand hierarchical receptive fields. See the receptive fields and hierarchical FPS receptive field sections for further details.
- –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "PointNet"is given below. For a description of the case when"type": "KPConv"see the KPConv operator documentation.- –
operations_per_depth A list specifying how many operations per depth level. The i-th element of the list gives the number of feature extraction operations at depth i.
- –
feature_space_dims A list specifying the output dimensionality of the feature space after each feature extraction operation. The i-th element of the list gives the dimensionality of the i-th feature extraction operation.
- –
bn Boolean flag to decide whether to enable batch normalization for feature extraction.
- –
bn_momentum Momentum for the moving average of the batch normalization, such that
new_mean = old_mean * momentum + batch_mean * (1 - momentum). See the Keras documentation on batch normalization for more details.- –
H_activation The activation function for the SharedMLP of each feature extraction operation. See the keras documentation on activations for more details.
- –
H_initializer The initialization method for the SharedMLP of each feature extraction operation. See the keras documentation on initializers for more details.
- –
H_regularizer The regularization strategy for the SharedMLP of each feature extraction operation. See the keras documentation on regularizers for more details.
- –
H_constraint The constraints for the SharedMLP of each feature extraction operation. See the keras documentation on constraints for more details.
- –
gamma_activation The constraints for the MLP of each feature extraction operation. See the keras documentation on activations for more details.
- –
gamma_kernel_initializer The initialization method for the MLP of each feature extraction operation (ignoring the bias term). See the keras documentation on initializers for more details.
- –
gamma_kernel_regularizer The regularization strategy for the MLP of each feature extraction operation (ignoring the bias term). See the keras documentation on regularizers for more details.
- –
gamma_kernel_constraint The constraints for the MLP of each feature extraction operation (ignoring the bias term). See the keras documentation on constraints for more details.
- –
gamma_bias_enabled Whether to enable the bias term for the MLP of each feature extraction operation.
- –
gamma_bias_initializer The initialization method for the bias term of the MLP of each feature extraction operation. See the keras documentation on initializers for more details.
- –
gamma_bias_regularizer The regularization strategy for the bias term of the MLP of each feature extraction operation. See the keras documentation on regularizers for more details.
- –
gamma_bias_constraint The constraints for the bias term of the MLP of each feature extraction operation. See the keras documentation on constraints for more details.
- –
- –
structure_alignment When given, this specification will govern the alignment of the structure space.
- –
tnet_pre_filters_spec List defining the number of pre-transformation filters at each depth.
- –
tnet_post_filters_spec List defining the number of post-transformation filters at each depth.
- –
kernel_initializer The kernel initialization method for the structure alignment layers. See the keras documentation on initializers for more details.
- –
- –
features_alignment When given, this specification will govern the alignment of the feature space. It is like the
structure_alignmentdictionary but it is applied to the features instead of the structure space. It must be null to mimic a classical KPConv model.- –
downsampling_filter The type of downsampling filter. See
FeaturesDownsamplingLayer,StridedKPConvLayer,StridedLightKPConvLayer, andInterdimensionalPointTransformerLayerfor more details.- –
upsampling_filter The type of upsampling filter. See
FeaturesUpsamplingLayerandInterdimnsionalPointTransformerLayerfor more details.- –
upsampling_bn Boolean flag to decide whether to enable batch normalization for upsampling transformations.
- –
upsampling_momentum Momentum for the moving average of the upsampling batch normalization, such that
new_mean = old_mean * momentum + batch_mean * (1-momentum). See the Keras documentation on batch normalization for more details.- –
conv1d_kernel_initializer The initialization method for the 1D convolutions during upsampling. See the keras documentation on initializers for more details.
- –
neck The neck block that connects the feature extraction hierarchy with the segmentation head. It can be
nullif no neck is desired. If given, it must be a dictionary governing the neck block.- –
max_depth An integer specifying the depth of the neck block.
- –
hidden_channels A list with the number of hidden channels (output dimensionality) at each depth of the neck block.
- –
kernel_initializer A list with the initialization method for the layers at each depth of the neck block. See the keras documentation on initializers for more details.
- –
kernel_regularizer A list with the regularization method for the layers at each depth of the neck block. See the keras documentation on regularizers for more details.
- –
kernel_constraint A list with the constraint for the layers at each depth of the neck block. See the keras documentation on constraints for more details.
- –
bn_momentum A list with the momentum for the moving average of the batch normalization at each depth of the neck block, such that
new_mean = old_mean * momentum + batch_mean * (1 - momentum). See the Keras documentation on batch normalization for more details.- –
activation A list with the name of the activation function to be used at each depth of the neck block. These names must match those listed in the Keras documentation on activations.
- –
- –
contextual_head The specification of the contextual head to be built on top of the standard output head of the neural network. If not given, then no contextual head will be used at all. Note that the contextual head is implemented as a
ContextualPointLayer.- –
multihead Let \(\mathcal{L}^{(1)}\) be the loss function from the standard output head and \(\mathcal{L}^{(2)}\) the loss function from the contextual head output. If the architecture has a single head (i.e., multihead set to false), then the model’s loss function will be \(\mathcal{L} = \mathcal{L}^{(2)}\). However, if the architecture is multiheaded (i.e., multihead set to true), then the model’s loss function will be \(\mathcal{L} = \mathcal{L}^{(1)} + \mathcal{L}^{(2)}\) .
- –
max_depth The number of contextual point layers in the contextual head.
- –
hidden_channels A list with the dimensionality of the hidden feature space for each contextual point layer.
- –
output_channels A list with the dimensionality of the output feature space for each contextual point layer.
- –
bn A list governing whether to include batch normalization at each contextual point layer.
- –
bn_momentum A list with the momentum for the batch normalization of each contextual point layer such that
new_mean = old_mean * momentum + batch_mean * (1 - momentum). See the Keras documentation on batch normalization for more details.- –
bn_along_neighbors A list governing whether to apply the batch normalization to the neighbors instead of the features, when possible.
- –
activation A list with the activation function for each contextual point layer. See the keras documentation on activations for more details.
- –
distance A list with the distance that must be used at each contextual point layer. Supported values are
"euclidean"and"squared".- –
ascending_order Whether to force distance-based ascending order of the neighborhoods (
true) or not (false).- –
aggregation A list with the aggregation strategy for each contextual point layer, either
"max"or"mean".- –
initializer A list with the initializer for the matrices and vectors of weights. See Keras documentation on layer initializers for further details.
- –
regularizer A list with the regularizer for the matrices and vectors of weights. See the keras documentation on regularizers for more details.
- –
constraint A list with the constraint for the matrices and vectors of weights. See the keras documentation on constraints for more details.
- –
- –
output_kernel_initializer The initialization method for the final 1D convolution that computes the point-wise outputs of the neural network. See the keras documentation on initializers for more details.
- –
model_handling Define how to handle the model, i.e., not the architecture itself but how it must be used. See the description of PointNet model handling for more details.
- –
compilation_args The arguments governing the model’s compilation. They include the optimizer, the loss function and the metrics to be monitored during training. See the optimizers section and losses section for further details.
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_confusion_matrix_report_path - –
training_confusion_matrix_report_plot - –
training_class_distribution_report_path - –
training_classified_point_cloud_path - –
training_activations_path
- –
Hierarchical feature extraction with KPConv
The ConvAutoencPwiseClassif architecture can be configured with
Kernel Point Convolution (KPConv) for feature extraction operations. The
downsampling strategy can be defined through the
FeaturesDownsamplingLayer or the StridedKPConvLayer,
the upsampling strateg through the FeaturesUpsamplingLayer, and
the feature extraction through the KPConvLayer. The JSON below
illustrates how to configure KPConv-based hierarchical feature extractor using
the VL3D framework. For further details on the original KPConv architecture,
readers are referred to
the KPConv paper (Thomas et al., 2019)
.
{
"in_pcloud": [
"/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/vl3d/kpconv_R/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["Reflectance", "ones"],
"random_seed": null,
"model_args": {
"fnames": ["Reflectance", "ones"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 60000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 2000,
"support_strategy_fast": true,
"center_on_pcloud": true,
"neighborhood": {
"type": "sphere",
"radius": 3.0,
"separation_factor": 0.8
},
"num_points_per_depth": [512, 256, 128, 64, 32],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 8, 8, 4],
"num_pwise_neighbors": [32, 16, 16, 8, 4],
"num_upsampling_neighbors": [1, 16, 8, 8, 4],
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"receptive_fields_dir": null,
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"feature_extraction": {
"type": "KPConv",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.0,
"activate": true,
"sigma": [3.0, 3.0, 3.0, 3.0, 3.0, 3.0],
"kernel_radius": [3.0, 3.0, 3.0, 3.0, 3.0, 3.0],
"num_kernel_points": [15, 15, 15, 15, 15, 15],
"deformable": [false, false, false, false, false, false],
"W_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W_regularizer": [null, null, null, null, null, null],
"W_constraint": [null, null, null, null, null, null],
"unary_convolution_wrapper": {
"activation": "relu",
"initializer": "glorot_uniform",
"bn": true,
"bn_momentum": 0.98,
"feature_dim_divisor": 2
}
},
"structure_alignment": null,
"features_alignment": null,
"downsampling_filter": "strided_kpconv",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.0,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"kpconv_representation_dir": "*/training_eval/kpconv_layers/",
"skpconv_representation_dir": "*/training_eval/skpconv_layers/",
"class_weight": [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
"training_epochs": 300,
"batch_size": 16,
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "SGD",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 15000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*pipe/KPC_T1.pipe",
"include_writer": false,
"include_imputer": false,
"include_feature_transformer": false,
"include_miner": false,
"include_class_transformer": false
}
]
}
The JSON above defines a ConvAutoencPwiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D spherical neighborhood
and the KPConv operator for feature extraction. It is expected to work on a
feature space with a column of ones (for feature-unbiased geometric features)
and another of reflectances.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.
- –
fnames The name of the features that must be given as input to the neural network. For hierarchical autoencoders this list can contain
"ones"to specify whether to include a column of ones in the input space matrix. This architecture does not support empty feature spaces as input, thus, when no features are given, the input feature space must be represented with a column of ones. NOTE that, for technical reasons, the feature names should also be given inside themodel_argsdictionary.
- –
random_seed Can be used to specify an integer like seed for any randomness-based computation. Mostly to be used for reproducibility purposes. Note that the initialization of a neural network is often based on random distributions. This parameter does not affect those distributions, so it will not guarantee reproducibility for of deep learning models.
- –
model_args The model specification.
- –
fnames The feature names must be given again inside the
model_argsdictionary due to technical reasons.
- –
num_classess An integer specifying the number of classes involved in the point-wise classification tasks.
- –
class_names The names of the classes involved in the classification task. Each string corresponds to the class associated to its index in the list.
- –
pre_processing How the select and fix stages of the deep learning strategy must be handled. Note that hierarchical autoencoders demand hierarchical receptive fields. See the receptive fields and hierarchical FPS receptive field sections for further details.
- –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "KPConv"is given below. For a description of the case when"type": "PointNet"see the PointNet operator documentation.- –
operations_per_depth A list specifying how many operations per depth level. The i-th element of the list gives the number of feature extraction operations at depth i.
- –
feature_space_dims A list specifying the output dimensionality of the feature space after each feature extration operation. The i-th element of the list gives the dimensionality of the i-th feature extraction operation.
- –
bn Boolean flag to decide whether to enable batch normalization for feature extraction.
- –
bn_momentum Momentum for the moving average of the batch normalization, such that
new_mean = old_mean * momentum + batch_mean * (1 - momentum). See the Keras documentation on batch normalization for more details.
- –
activate Trueto activate the output of the KPConv,Falseotherwise.
- –
sigma The influence distance of the kernel points for each KPConv.
- –
kernel_radius The radius of the ball where the kernel points belong for each KPConv.
- –
num_kernel_points The number of points (i.e., structure space dimensionality) for each KPConv kernel.
- –
deformable Whether the structure space of the KPConv will be optimized (
True) or not (False), for each KPConv.- –
W_initializer The initialization method for the weights of each KPConv. See the keras documentation on initializers for more details.
- –
W_regularizer The regularization strategy for weights of each KPConv. See the keras documentation on regularizers for more details.
- –
W_constraint The constraints of the weights of each KPConv. See the keras documentation on constraints for more details.
- –
unary_convolution_wrapper The specification of the unary convolutions (aka SharedMLPs) to be applied before the KPConv layer to half the feature dimensionality and also after to restore it.
- –
activation The activation function for each unary convolution / SharedMLP. See the keras documentation on activations for more details.
- –
activate_postwrap Whether to include an activation function after the unary convolution (after the batch normalization, if any).
- –
initializer The initialization method for the point-wise unary convolutions (SharedMLPs). See the keras documentation on initializers for more details.
- –
bn Whether to enable batch normalization (
True) or not (False).- –
bn_momentum Momentum for the moving average of the batch normalization, such that
new_mean = old_mean * momentum + batch_mean * (1 - momentum). See the Keras documentation on batch normalization for more details.- –
postwrap_bn Whether to include a batch normalization layer after the unary convolution.
- –
feature_dim_divisor The divisor for the dimensionality in the unary convolution wrapper. The number of features will be divided by this number. The default is \(2\).
- –
- –
- –
structure_alignment When given, this specification will govern the alignment of the structure space.
- –
tnet_pre_filters_spec List defining the number of pre-transformation filters at each depth.
- –
tnet_post_filters_spec List defining the number of post-transformation filters at each depth.
- –
kernel_initializer The kernel initialization method for the structure alignment layers. See the keras documentation on initializers for more details.
- –
- –
features_alignment When given, this specification will govern the alignment of the feature space. It is like the
structure_alignmentdictionary but it is applied to the features instead of the structure space.- –
downsampling_filter The type of downsampling filter. See
StridedKPConvLayer,FeaturesDownsamplingLayer, andInterdimensionalPointTransformerLayerfor more details.- –
upsampling_filter The type of upsampling filter. See
FeaturesUpsamplingLayerandInterdimensionalPointTransformerLayerfor more details.
- –
upsampling_bn Boolean flag to decide whether to enable batch normalization for upsampling transformations.
- –
upsampling_momentum Momentum for the moving average of the upsampling batch normalization, such that
new_mean = old_mean * momentum + batch_mean * (1-momentum). See the Keras documentation on batch normalization for more details.
- –
conv1d_kernel_initializer The initialization method for the 1D convolutions during upsampling. See the keras documentation on initializers for more details.
- –
output_kernel_initializer The initialization method for the final 1D convolution that computes the point-wise outputs of the neural network. See the keras documentation on initializers for more details.
- –
model_handling Define how to handle the model, i.e., not the architecture itself but how it must be used. See the description of PointNet model handling for more details. The main difference for hierarchical autoencoders using KPConv are:
- –
kpconv_representation_dir Path where the plots and CSV data representing the KPConv kernels will be stored.
- –
skpconv_representation_dir Path where the plots and CSV data representing the strided KPConv kernels will be stored.
- –
- –
compilation_args The arguments governing the model’s compilation. They include the optimizer, the loss function and the metrics to be monitored during training. See the optimizers section and losses section for further details.
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_confusion_matrix_report_path - –
training_confusion_matrix_report_plot - –
training_class_distribution_report_path - –
training_classified_point_cloud_path - –
training_activations_path
- –
Hierarchical feature extraction with SFL-NET
The ConvAutoencPwiseClassif architecture can be configured as a
Slight Filter Learning Network (SFL-NET). This neural network for 3D point
clouds was introduced in
the SFL-NET paper (Li et al., 2023)
. It uses a simplified version of KPConv and changes the shared MLPs by
hourglasses in the upsampling and final layers. On top of that, it uses the
hourglass layer to define a residual hourglass block that wraps each
feature extraction layer at the different depths of the encoding hierarchy.
The JSON below illustrates how to configure a SFL-NET-like hierarchical feature
extractor using the VL3D framework.
{
"in_pcloud": [
"/oldext4/lidar_data/vl3dhack/data/dales/train/5080_54435.laz"
],
"out_pcloud": [
"/oldext4/lidar_data/vl3dhack/multiclass/out/DL_SFLNET/T1/*"
],
"sequential_pipeline": [
{
"class_transformer": "ClassReducer",
"on_predictions": false,
"input_class_names": ["noclass", "ground", "vegetation", "cars", "trucks", "powerlines", "fences", "poles", "buildings"],
"output_class_names": ["ground", "vegetation", "buildings", "powerlines", "objects", "noclass"],
"class_groups": [["ground"], ["vegetation"], ["buildings"], ["powerlines"], ["cars", "trucks", "fences", "poles"], ["noclass"]],
"report_path": "*class_reduction.log",
"plot_path": "*class_reduction.svg"
},
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones"],
"random_seed": null,
"model_args": {
"fnames": ["ones"],
"num_classes": 6,
"class_names": ["ground", "vegetation", "buildings", "powerlines", "objects", "noclass"],
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 200000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 10000,
"support_strategy_fast": true,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"neighborhood": {
"type": "sphere",
"radius": 6.0,
"separation_factor": 0.8
},
"num_points_per_depth": [256, 128, 64, 32, 16],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": "*/training_eval/training_rf/",
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"_receptive_fields_dir": "*/training_eval/receptive_fields/",
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"feature_extraction": {
"type": "LightKPConv",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.98,
"activate": true,
"sigma": [6.0, 6.0, 7.5, 9.0, 10.5, 12.0],
"kernel_radius": [6.0, 6.0, 6.0, 6.0, 6.0, 6.0],
"num_kernel_points": [15, 15, 15, 15, 15, 15],
"deformable": [false, false, false, false, false, false],
"W_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W_regularizer": [null, null, null, null, null, null],
"W_constraint": [null, null, null, null, null, null],
"A_trainable": [true, true, true, true, true ,true],
"A_regularizer": [null, null, null, null, null, null],
"A_constraint": [null, null, null, null, null, null],
"A_initializer": ["ones", "ones", "ones", "ones", "ones", "ones"],
"unary_convolution_wrapper": null,
"hourglass_wrapper": {
"internal_dim": [2, 2, 4, 16, 32, 64],
"parallel_internal_dim": [8, 8, 16, 32, 64, 128],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"activation2": [null, null, null, null, null, null],
"regularize": [true, true, true, true, true, true],
"W1_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W1_regularizer": [null, null, null, null, null, null],
"W1_constraint": [null, null, null, null, null, null],
"W2_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W2_regularizer": [null, null, null, null, null, null],
"W2_constraint": [null, null, null, null, null, null],
"loss_factor": 0.1,
"subspace_factor": 0.125,
"feature_dim_divisor": 4,
"bn": false,
"bn_momentum": 0.98,
"out_bn": true,
"out_bn_momentum": 0.98,
"out_activation": "relu"
}
},
"features_alignment": null,
"downsampling_filter": "strided_lightkpconv",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"upsampling_hourglass": {
"activation": "relu",
"activation2": null,
"regularize": true,
"W1_initializer": "glorot_uniform",
"W1_regularizer": null,
"W1_constraint": null,
"W2_initializer": "glorot_uniform",
"W2_regularizer": null,
"W2_constraint": null,
"loss_factor": 0.1,
"subspace_factor": 0.125
},
"conv1d": false,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"kpconv_representation_dir": "*/training_eval/kpconv_layers/",
"skpconv_representation_dir": "*/training_eval/skpconv_layers/",
"lkpconv_representation_dir": "*/training_eval/lkpconv_layers/",
"slkpconv_representation_dir": "*/training_eval/slkpconv_layers/",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 0.0],
"training_epochs": 300,
"batch_size": 64,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.99,
"end": 1.01
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.001
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 9000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/SFLNET.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The JSON above defines a ConvAutoencPwiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D spherical neighborhood
to prepare the input for a SFL-NET model. The subspace and loss factors are
configured to \(\alpha=1/8\) and \(\beta=1/10\), as recommended in
the SFL-NET paper (Li et al., 2023)
.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.- –
fnames - –
random_seed - –
model_args The model specification.
- –
fnames - –
num_classes - –
class_names - –
pre_processing - –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "LightKPConv"and all the shared MLPs / unary convolutions are replaced by hourglass layers and hourglass residual blocks is given below. For a description of the case when"type": "KPConv"see the KPConv operator documentation. For a description of the general case"type": "LightKPConv"see the LightKPConv operator documentation .- –
operations_per_depth - –
feature_space_dims - –
bn - –
bn_momentum - –
activate - –
sigma - –
kernel_radius - –
num_kernel_points - –
deformable - –
W_initializer The initialization method for the weights of each light KPConv. See the keras documentation on initializers for more details.
- –
W_regularizer The regularization strategy for the weights of each light KPConv. See the keras documentation on regularizers for more details.
- –
W_constraint The constraints of the weights of each light KPConv. See the keras documentation on constraints for more details.
- –
unary_convolution_wrapper To mimic a SFL-NET this specification must be set to null because SFL-NET uses a residual hourglass block instead of shared MLPs.
- –
hourglass_wrapper The specification of how to use hourglass layers to wrap the feature extraction layers. To mimic a SFL-NET it is necessary to use an hourglass wrapper and avoid unary convolutions at all.
- –
internal_dim A list with the internal dimensions for the first transform in a
HourglassLayer. NOTE that this value is ignored when a subspace factor \(\alpha\) is given.- –
parallel_internal_dim A list with the internal dimensions for the
HourglassLayerin the residual block. NOTE that this value is ignored when a subspace factor \(\alpha\) is given.- –
activation The first activation function (i.e., \(\sigma_1\)) for each
HourglassLayer. See the keras documentation on activations for more details.- –
activation2 The second activation function (i.e., \(\sigma_2\)) for each
HourglassLayer. See the keras documentation on activations for more details.- –
activate_postwrap Whether to include an activation function to finish the wrapping of the feature extractor operator.
- –
activate_residual Whether to include an activation function to finish the residual block. Note that the standard practice is to avoid activation functions at the end of residual feature extraction blocks to keep them linear.
- –
regularize Whether to regularize each
HourglassLayerby adding \(\beta + \mathcal{L}_h\) to the loss function (True) or not (False).- –
spectral_strategy What strategy use to compute the spectral norm. It can be either “unsafe” (fast but might break during training), “safe” (will work during training but can be twice slower), or “approx” (as fast as unsafe but computing the approximated norm after applying a small tikhonov regularization to prevent numerical issues, DEFAULT).
- –
W1_initializer The initialization method for the first matrix of weights for each
HourglassLayer. See the keras documentation on initializers for more details.- –
W1_regularizer The regularization strategy for the first matrix of weights for each
HourglassLayer. See the keras documentation on regularizers for more details.- –
W1_constraint The constraint of the first matrix of weights for each
HourglassLayer. See the keras documentation on constraints for more details.- –
W2_initializer The initialization method for the second matrix of weights for each
HourglassLayer. See the keras documentation on initializers for more details.- –
W2_regularizer The regularization strategy for the second matrix of weights for each
HourglassLayer. See the keras documentation on regularizers for more details.- –
W2_constraint The constraint of the second matrix of weights for each
HourglassLayer. See the keras documentation on constraints for more details.- –
loss_factor The loss factor \(\beta\) for any
HourglassLayer. It governs the impact of the extra term \(\beta \mathcal{L}_h\) in the loss function. NOTE that the loss factor will only be considered when regularize is set toTrue.- –
subspace_factor The subspace factor \(\alpha\) for any
HourglassLayer. When given, the internal dimensionality \(D_h\) will be:\[D_h = \alpha \; \max \; \left\{D_{\mathrm{in}}, D_{\mathrm{out}}\right\}\]NOTE that when given, any specification of the internal dimensionalities will be replaced by the values derived by applying the subspace factor.
- –
feature_dim_divisor The divisor to determine the output dimensionality of the pre-wrapper hourglass layer. The dimensionality will be calculated as \(D_{\text{in}} / \text{feature_dim_divisor}\).
- –
bn Whether to include batch normalization to the main branch before merging with the residual block.
- –
bn_momentum The momentum for the moving average of the batch normalization (as explained for PointNet++ bn_momentum specification ).
- –
out_bn Whether to include a batch normalization layer after the linear superposition of the residual block with the main branch (
true) or not (false).- –
merge_bn Alias for
out_bn. Note that if both are specified,out_bnhas preference overmerge_bn.- –
out_bn_momentum The momentum for the moving average of the batch normalization after the linear superposition of the residual block with the main branch (as explained for PointNet++ bn_momentum specification ).
- –
out_activation Whether to include an activation layer after the linear superposition (and after the batch normalization, if any) of the residual block with the main branch (
true) or not (false).
- –
- –
- –
features_alignment It must be null to mimic a SFL-NET model. See KPConv arguments documentation for further details.
- –
downsampling_filter It must be configured to
"strided_lightkpconv"(seeStridedLightKPConvLayer) to mimic a SFL-NET model.- –
upsampling_filter The original upsampling strategy for KPConv and derived architectures is
"nearest"(i.e., nearest upsampling). However, in VL3D++ examples we often use"mean"for our baseline models because we found it yields better results. SeeFeaturesUpsamplingLayerandInterdimensionalPointTransformerLayerfor more details.- –
upsampling_bn - –
upsampling_momentum - –
conv1d Boolean flag governing whether to use unary convolutions (shared MLPs) to wrap the hourglass or not. SFL-NET models use hourglass layers instead of shared MLPs so it must be set to
Falsewhen mimicking this model.- –
conv1d_kernel_initializer - –
output_kernel_initializer - –
model_handling See KPConv arguments documentation and LightKPConv arguments documentation .
- –
compilation_args - –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_confusion_matrix_report_path - –
training_confusion_matrix_report_plot - –
training_class_distribution_report_path - –
training_classified_point_cloud_path - –
training_activations_path
- –
Hierarchical feature extraction with LightKPConv
The ConvAutoencPwiseClassif architecture can be configured using a
light-weight version of the KPConvLayer that for \(K\) kernel
points uses only two matrices: 1) the weights
\(\pmb{W} \in \mathbb{R}^{D_{\mathrm{in}} \times D_{\mathrm{out}}}\) and
2) the scale factors
\(\pmb{A} \in \mathbb{R}^{m_q \times D_{\mathrm{in}}}\). Furthe details
can be seen in the LightKPConvLayer documentation. The main
difference with the classical KPConvLayer consists in updating
the original equation:
to the light-weight version:
Note that, when all the shared MLPs are replaced by hourglass blocks, the
LightKPConvLayer can be used in the context of a
ConvAutoencPwiseClassif model to mimic the SFL-NET model as described
in the
hierarchical feature extraction with SFL-NET section
. The rest of this section is devoted to describe the general usage of the
LightKPConvLayer. The JSON bellow illustrates how to configure
LightKPConv-based hierarchical feature extractors using the VL3D framework.
{
"in_pcloud": [
"/oldext4/lidar_data/vl3dhack/data/dales/train/5080_54435.laz"
],
"out_pcloud": [
"/oldext4/lidar_data/vl3dhack/multiclass/out/DL_LKPC/T1/*"
],
"sequential_pipeline": [
{
"class_transformer": "ClassReducer",
"on_predictions": false,
"input_class_names": ["noclass", "ground", "vegetation", "cars", "trucks", "powerlines", "fences", "poles", "buildings"],
"output_class_names": ["ground", "vegetation", "buildings", "powerlines", "objects", "noclass"],
"class_groups": [["ground"], ["vegetation"], ["buildings"], ["powerlines"], ["cars", "trucks", "fences", "poles"], ["noclass"]],
"report_path": "*class_reduction.log",
"plot_path": "*class_reduction.svg"
},
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones"],
"random_seed": null,
"model_args": {
"fnames": ["ones"],
"num_classes": 6,
"class_names": ["ground", "vegetation", "buildings", "powerlines", "objects", "noclass"],
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 200000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 10000,
"support_strategy_fast": true,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"neighborhood": {
"type": "sphere",
"radius": 6.0,
"separation_factor": 0.8
},
"num_points_per_depth": [256, 128, 64, 32, 16],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": "*/training_eval/training_rf/",
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"_receptive_fields_dir": "*/training_eval/receptive_fields/",
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"feature_extraction": {
"type": "LightKPConv",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.98,
"activate": true,
"sigma": [6.0, 6.0, 7.5, 9.0, 10.5, 12.0],
"kernel_radius": [6.0, 6.0, 6.0, 6.0, 6.0, 6.0],
"num_kernel_points": [15, 15, 15, 15, 15, 15],
"deformable": [false, false, false, false, false, false],
"W_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W_regularizer": [null, null, null, null, null, null],
"W_constraint": [null, null, null, null, null, null],
"A_trainable": [true, true, true, true, true ,true],
"A_regularizer": [null, null, null, null, null, null],
"A_constraint": [null, null, null, null, null, null],
"A_initializer": ["ones", "ones", "ones", "ones", "ones", "ones"],
"_unary_convolution_wrapper": {
"activation": "relu",
"initializer": "glorot_uniform",
"bn": true,
"bn_momentum": 0.98,
"feature_dim_divisor": 2
},
"hourglass_wrapper": {
"internal_dim": [2, 2, 4, 16, 32, 64],
"parallel_internal_dim": [8, 8, 16, 32, 64, 128],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"activation2": [null, null, null, null, null, null],
"regularize": [true, true, true, true, true, true],
"W1_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W1_regularizer": [null, null, null, null, null, null],
"W1_constraint": [null, null, null, null, null, null],
"W2_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W2_regularizer": [null, null, null, null, null, null],
"W2_constraint": [null, null, null, null, null, null],
"loss_factor": 0.1,
"subspace_factor": 0.125,
"feature_dim_divisor": 4,
"bn": false,
"bn_momentum": 0.98,
"out_bn": true,
"out_bn_momentum": 0.98,
"out_activation": "relu"
}
},
"features_alignment": null,
"downsampling_filter": "strided_lightkpconv",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"_upsampling_hourglass": {
"activation": "relu",
"activation2": null,
"regularize": true,
"W1_initializer": "glorot_uniform",
"W1_regularizer": null,
"W1_constraint": null,
"W2_initializer": "glorot_uniform",
"W2_regularizer": null,
"W2_constraint": null,
"loss_factor": 0.1,
"subspace_factor": 0.125
},
"conv1d": true,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"_features_structuring_representation_dir": "*/training_eval/feat_struct_layer/",
"kpconv_representation_dir": "*/training_eval/kpconv_layers/",
"skpconv_representation_dir": "*/training_eval/skpconv_layers/",
"lkpconv_representation_dir": "*/training_eval/lkpconv_layers/",
"slkpconv_representation_dir": "*/training_eval/slkpconv_layers/",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 0.0],
"training_epochs": 300,
"batch_size": 64,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.99,
"end": 1.01
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.001
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 9000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/LKPConv.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The JSON above defines a ConvAutoencPwiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D spherical neighborhood
to prepare the input for a LightKPConv-based model. It uses
HourglassLayer and StridedLightKPConvLayer during
the hierarchical encoding (similar to a
SFL-NET model) and a
FeaturesUpsamplingLayer with a mean reduction as well as
shared MLPs (unary convolutions) during the hierarchical decoding.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.- –
fnames - –
random_seed - –
model_args The model specification.
- –
fnames - –
num_classes - –
class_names - –
pre_processing - –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "LightKPConv"is given below. For a description of the case when"type": "PointNet"see the PointNet operator documentation, for the case"type": "KPConv"see the KPConv operator documentation, and to mimic a SFL-NET model see the SFL-NET documentation.- –
operations_per_depth - –
feature_space_dims - –
bn - –
bn_momentum - –
activate - –
sigma - –
kernel_radius - –
num_kernel_points - –
deformable - –
W_initializer The initialization method for the weights of each light KPConv. See the keras documentation on initializers for more details.
- –
W_regularizer The regularization strategy for weights of each light KPConv. See the keras documentation on regularizers for more details.
- –
W_constraint The constraints of the weights of each light KPConv. See the keras documentation on constraints for more details.
- –
unary_convolution_wrapper It can be used to configure a LightKPconv model that uses shared MLPs to wrap the feature extraction operators like a KPConv model or it can be set to null to use an
hourglass_wrapperinstead, similar to a SFL-NET model. See the KPConv arguments documentation for further details.- –
hourglass_wrapper The specification of how to use hourglass layers to wrap the feature extraction layers. See the SFL-NET arguments documentation for further details.
- –
- –
features_alignment - –
downsampling_filter It can be configured to
"strided_lightkpconv"(seeStridedLightKPConvLayer) but it is also possible to use"strided_kpconv"to use the classicalStridedKPConvLayerduring downsampling. TheFeaturesDownsamplingLayerandInterdimensionalPointTransformerLayerare also supported.- –
upsampling_filter The original upsampling strategy for KPConv and derived architectures is
"nearest"(i.e., nearest upsampling). However, in VL3D++ examples we often use"mean"for our baseline models because we found it yields better results. SeeFeaturesUpsamplingLayerandInterdimensionalPointTransformerLayerfor more details.- –
upsampling_bn - –
upsampling_momentum - –
conv1d Boolean flag governing whether to use unary convolutions (shared MLPs) to wrap the hourglass or not. SFL-NET models use hourglass layers instead (i.e.,
False), classical KPConv models use shared MLPs instead (i.e.,True).- –
conv1d_kernel_initializer - –
output_kernel_initializer
- –
model_handling The model handling specification can be read in the KPConv arguments documentation. Here, only the special arguments for LightKPConv-based models are detailed:
- –
lkpconv_representation_dir Path where the plots and CSV data representing the LightKPConv layers will be stored.
- –
slkpconv_representation_dir Path where the plots and CSV data representing the strided LightKPConv layers will be stored.
- –
- –
compilation_args
- –
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_confusion_matrix_report_path - –
training_confusion_matrix_report_plot - –
training_class_distribution_report_path - –
training_classified_point_cloud_path - –
training_activations_path
Hierarchical feature extraction with PointTransformer
The ConvAutoencPwiseClassif architecture can be configured using
PointTransformerLayer as the feature extraction strategy. Besides, the
downsampling and upsampling operations can be carried out through
InterdimensionalPointTransformerLayer. The
PointTransformerLayer feature extractor can be summarized through the
following equation
where the positional encoding \(\delta(\pmb{x}_{i*}, \pmb{x}_{j*})\) corresponds to
For further details about the variables see the PointTransformerLayer
class documentation and
the Point Transformer paper (Zhao et al., 2021).
The JSON below illustrates how to configure Point Transformer-based hierarchical feature extractors using the VL3D++ framework.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pttransf/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "PointTransformer",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 96, 128, 192, 256],
"bn": true,
"bn_momentum": 0.98,
"activate": true,
"Phi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Phi_regularizer": [null, null, null, null, null, null],
"Phi_constraint": [null, null, null, null, null, null],
"Psi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Psi_regularizer": [null, null, null, null, null, null],
"Psi_constraint": [null, null, null, null, null, null],
"A_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"A_regularizer": [null, null, null, null, null, null],
"A_constraint": [null, null, null, null, null, null],
"Gamma_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Gamma_regularizer": [null, null, null, null, null, null],
"Gamma_constraint": [null, null, null, null, null, null],
"Theta_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Theta_regularizer": [null, null, null, null, null, null],
"Theta_constraint": [null, null, null, null, null, null],
"ThetaTilde_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaTilde_regularizer": [null, null, null, null, null, null],
"ThetaTilde_constraint": [null, null, null, null, null, null],
"phi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"phi_regularizer": [null, null, null, null, null, null],
"phi_constraint": [null, null, null, null, null, null],
"psi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"psi_regularizer": [null, null, null, null, null, null],
"psi_constraint": [null, null, null, null, null, null],
"a_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"a_regularizer": [null, null, null, null, null, null],
"a_constraint": [null, null, null, null, null, null],
"gamma_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"gamma_regularizer": [null, null, null, null, null, null],
"gamma_constraint": [null, null, null, null, null, null],
"theta_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"theta_regularizer": [null, null, null, null, null, null],
"theta_constraint": [null, null, null, null, null, null],
"thetaTilde_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaTilde_regularizer": [null, null, null, null, null, null],
"thetaTilde_constraint": [null, null, null, null, null, null],
"point_transformer_wrapper": {
"feature_dim_divisor": 2,
"residual": true,
"bn": true,
"postwrap_bn": true,
"merge_bn": false,
"bn_momentum": 0.98,
"activation": "relu",
"activate_postwrap": true,
"activate_residual": false,
"Phi_initializer": "glorot_uniform",
"Phi_regularizer": null,
"Phi_constraint": null,
"Psi_initializer": "glorot_uniform",
"Psi_regularizer": null,
"Psi_constraint": null,
"A_initializer": "glorot_uniform",
"A_regularizer": null,
"A_constraint": null,
"Gamma_initializer": "glorot_uniform",
"Gamma_regularizer": null,
"Gamma_constraint": null,
"Theta_initializer": "glorot_uniform",
"Theta_regularizer": null,
"Theta_constraint": null,
"ThetaTilde_initializer": "glorot_uniform",
"ThetaTilde_regularizer": null,
"ThetaTilde_constraint": null,
"phi_initializer": "glorot_uniform",
"phi_regularizer": null,
"phi_constraint": null,
"psi_initializer": "glorot_uniform",
"psi_regularizer": null,
"psi_constraint": null,
"a_initializer": "glorot_uniform",
"a_regularizer": null,
"a_constraint": null,
"gamma_initializer": "glorot_uniform",
"gamma_regularizer": null,
"gamma_constraint": null,
"theta_initializer": "glorot_uniform",
"theta_regularizer": null,
"theta_constraint": null,
"thetaTilde_initializer": "glorot_uniform",
"thetaTilde_regularizer": null,
"thetaTilde_constraint": null
}
},
"features_alignment": null,
"downsampling_filter": "interdimensional_point_transformer",
"upsampling_filter": "interdimensional_point_transformer",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"conv1d": false,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 150,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 5000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/PointTransformer.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The JSON above defines a ConvAutoencPwiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D spherical neighborhood
to prepare the input for a PointTransformer-based model. It uses
PointTransformerLayer for feature extraction and
InterdimensionalPointTransformerLayer for downsampling and
upsampling.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.- –
fnames - –
random_seed - –
model_args The model specification.
- –
fnames - –
num_classes - –
class_names - –
pre_processing - –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "PointTransformer"is given below. For a description of the case when"type": "PointNet"see the PointNet operator documentation, for the case"type": "KPConv"see the KPConv operator documentation, to mimic a SFL-NET model see the SFL-NET documentation, and for the case"type": "LightKPConv"see the LightKPConv operator documentation.- –
operations_per_depth - –
feature_space_dims - –
bn - –
bn_momentum - –
activate
- –
Phi_initializer The initialization method for the \(\pmb{\Phi}\) weights matrix of each PointTransformer. See the keras documentation on initializers for more details.
- –
Phi_regularizer The regularization strategy for the \(\pmb{\Phi}\) weights matrix of each PointTransformer. See the keras documentation on regularizers for more details.
- –
Phi_constraint The constraints of the \(\pmb{\Phi}\) weights matrix of each Point Transformer. See the keras documentation on constraints for more details.
- –
Psi_initializer The initialization method for the \(\pmb{\Psi}\) weights matrix of each PointTransformer. See the keras documentation on initializers for more details.
- –
Psi_regularizer The regularization strategy for the \(\pmb{\Psi}\) weights matrix of each PointTransformer. See the keras documentation on regularizers for more details.
- –
Psi_constraint The constraints of the \(\pmb{\Psi}\) weights matrix of each Point Transformer. See the keras documentation on constraints for more details.
- –
A_initializer The initialization method for the \(\pmb{A}\) weights matrix of each PointTransformer. See the keras documentation on initializers for more details.
- –
A_regularizer The regularization strategy for the \(\pmb{A}\) weights matrix of each PointTransformer. See the keras documentation on regularizers for more details.
- –
A_constraint The constraints of the \(\pmb{A}\) weights matrix of each Point Transformer. See the keras documentation on constraints for more details.
- –
Gamma_initializer The initialization method for the \(\pmb{\Gamma}\) weights matrix of each PointTransformer. See the keras documentation on initializers for more details.
- –
Gamma_regularizer The regularization strategy for the \(\pmb{\Gamma}\) weights matrix of each PointTransformer. See the keras documentation on regularizers for more details.
- –
Gamma_constraint The constraints of the \(\pmb{\Gamma}\) weights matrix of each Point Transformer. See the keras documentation on constraints for more details.
- –
Theta_initializer The initialization method for the \(\pmb{\Theta}\) weights matrix of each PointTransformer. See the keras documentation on initializers for more details.
- –
Theta_regularizer The regularization strategy for the \(\pmb{\Theta}\) weights matrix of each PointTransformer. See the keras documentation on regularizers for more details.
- –
Theta_constraint The constraints of the \(\pmb{\Theta}\) weights matrix of each Point Transformer. See the keras documentation on constraints for more details.
- –
ThetaTilde_initializer The initialization method for the \(\pmb{\widetilde{\Theta}}\) weights matrix of each PointTransformer. See the keras documentation on initializers for more details.
- –
ThetaTilde_regularizer The regularization strategy for the \(\pmb{\widetilde{\Theta}}\) weights matrix of each PointTransformer. See the keras documentation on regularizers for more details.
- –
ThetaTilde_constraint The constraints of the \(\pmb{\widetilde{\Theta}}\) weights matrix of each Point Transformer. See the keras documentation on constraints for more details.
- –
phi_initializer The initialization method for the \(\pmb{\phi}\) weights vector of each PointTransformer. See the keras documentation on initializers for more details.
- –
phi_regularizer The regularization strategy for the \(\pmb{\phi}\) weights vector of each PointTransformer. See the keras documentation on regularizers for more details.
- –
phi_constraint The constraints of the \(\pmb{\phi}\) weights vector of each Point Transformer. See the keras documentation on constraints for more details.
- –
psi_initializer The initialization method for the \(\pmb{\psi}\) weights vector of each PointTransformer. See the keras documentation on initializers for more details.
- –
psi_regularizer The regularization strategy for the \(\pmb{\psi}\) weights vector of each PointTransformer. See the keras documentation on regularizers for more details.
- –
psi_constraint The constraints of the \(\pmb{\psi}\) weights vector of each Point Transformer. See the keras documentation on constraints for more details.
- –
a_initializer The initialization method for the \(\pmb{a}\) weights vector of each PointTransformer. See the keras documentation on initializers for more details.
- –
a_regularizer The regularization strategy for the \(\pmb{a}\) weights vector of each PointTransformer. See the keras documentation on regularizers for more details.
- –
a_constraint The constraints of the \(\pmb{a}\) weights vector of each Point Transformer. See the keras documentation on constraints for more details.
- –
gamma_initializer The initialization method for the \(\pmb{\gamma}\) weights vector of each PointTransformer. See the keras documentation on initializers for more details.
- –
gamma_regularizer The regularization strategy for the \(\pmb{\gamma}\) weights vector of each PointTransformer. See the keras documentation on regularizers for more details.
- –
gamma_constraint The constraints of the \(\pmb{\gamma}\) weights vector of each Point Transformer. See the keras documentation on constraints for more details.
- –
theta_initializer The initialization method for the \(\pmb{\theta}\) weights vector of each PointTransformer. See the keras documentation on initializers for more details.
- –
theta_regularizer The regularization strategy for the \(\pmb{\theta}\) weights vector of each PointTransformer. See the keras documentation on regularizers for more details.
- –
theta_constraint The constraints of the \(\pmb{\theta}\) weights vector of each Point Transformer. See the keras documentation on constraints for more details.
- –
thetaTilde_initializer The initialization method for the \(\pmb{\tilde{\theta}}\) weights vector of each PointTransformer. See the keras documentation on initializers for more details.
- –
thetaTilde_regularizer The regularization strategy for the \(\pmb{\tilde{\Theta}}\) weights vector of each PointTransformer. See the keras documentation on regularizers for more details.
- –
thetaTilde_constraint The constraints of the \(\pmb{\tilde{\theta}}\) weights vector of each Point Transformer. See the keras documentation on constraints for more details.
- –
unary_convolution_wrapper It can be used to configure a LightKPconv model that uses shared MLPs to wrap the feature extraction operators like a KPConv model or it can be set to null to use an
hourglass_wrapperinstead, similar to a SFL-NET model. See the KPConv arguments documentation for further details.- –
hourglass_wrapper The specification of how to use hourglass layers to wrap the feature extraction layers. See the SFL-NET arguments documentation for further details.
- –
point_transformer_wrapper The specification of how to use Point Transformer layers to wrap the feature extraction layers (with/out residual block).
- –
feature_dim_divisor See SFL-NET hourglass documentation on feature_dim_divisor .
- –
residual Whether to include another
PointTransformerLayerin a residual branch. Default isfalse.- –
bn - –
postwrap_bn Whether to include a batch normalization layer after the feature extractor but before merging with the parallel branch.
- –
merge_bn Whether to include a batch normalization layer after the linear superposition of the residual block with the main branch (
true) or not (false).- –
bn_momentum The momentum for the moving average of the batch normalization (as explained for PointNet++ bn_momentum specification ).
- –
activation The activation function for the wrapper and residual point transformers. See the keras documentation on activations for more details.
- –
activate_postwrap Whether to include an activation function after the point transformer (after the batch normalization, if any) but before merging with the residual parallel branch.
- –
activate_residual Whether to activate the parallel branch after the feature extraction (and the batch normalization, if any). Note that when using parallel branches as residual blocks the typical approach is to avoid activation to keep it linear.
- –
Phi_initializer - –
Phi_regularizer - –
Phi_constraint - –
Psi_initializer - –
Psi_regularizer - –
Psi_constraint - –
Gamma_initializer - –
Gamma_regularizer - –
Gamma_constraint - –
A_initializer - –
A_regularizer - –
A_constraint - –
Theta_initializer - –
Theta_regularizer - –
Theta_constraint - –
ThetaTilde_initializer - –
ThetaTilde_regularizer - –
ThetaTilde_constraint - –
phi_initializer - –
phi_regularizer - –
phi_constraint - –
psi_initializer - –
psi_regularizer - –
psi_constraint - –
gamma_initializer - –
gamma_regularizer - –
gamma_constraint - –
a_initializer - –
a_regularizer - –
a_constraint - –
theta_initializer - –
theta_regularizer - –
theta_constraint - –
thetaTilde_initializer - –
thetaTilde_regularizer - –
thetaTilde_constraint
- –
- –
- –
features_alignment - –
downsampling_filter It can be configured to
"strided_lightkpconv"(seeStridedLightKPConvLayer) but it is also possible to use"strided_kpconv"to use the classicalStridedKPConvLayerduring downsampling. TheFeaturesDownsamplingLayerandInterdimensionalPointTransformerLayerare also supported.- –
upsampling_filter The original upsampling strategy for KPConv and derived architectures is
"nearest"(i.e., nearest upsampling). However, in VL3D++ examples we often use"mean"for our baseline models because we found it yields better results. SeeFeaturesUpsamplingLayerandInterdimensionalPointTransformerLayerfor more details.- –
upsampling_bn - –
upsampling_momentum - –
conv1d Boolean flag governing whether to use unary convolutions (shared MLPs) to wrap the hourglass or not. SFL-NET models use hourglass layers instead (i.e.,
False), classical KPConv models use shared MLPs instead (i.e.,True).- –
conv1d_kernel_initializer - –
output_kernel_initializer
- –
model_handling The model handling specification can be read in the KPConv arguments documentation.
- –
compilation_args
- –
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_confusion_matrix_report_path - –
training_confusion_matrix_report_plot - –
training_class_distribution_report_path - –
training_classified_point_cloud_path - –
training_activations_path
Hierarchical feature extraction with GroupedPointTransformer
The ConvAutoencPwiseClassif architecture can be configured using
GroupedPointTransformerLayer as the feature extraction strategy.
For further details about the variables see the
GroupedPointTransformerLayer class documentation and
the Point Transformer v2 paper about Grouped Vector Attention (Wu et al., 2022).
The JSON below illustrates how to configure Grouped Point Transformer-based hierarchical feature extractors using the VL3D++ framework.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/gpttransf_alt/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "GroupedPointTransformer",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 96, 128, 192, 256],
"init_ftransf_bn": true,
"init_ftransf_bn_momentum": 0.98,
"groups": [8, 8, 12, 16, 24, 32],
"dropout_rate": [0.25, 0.25, 0.25, 0.25, 0.25, 0.25],
"bn": false,
"bn_momentum": 0.98,
"activate": false,
"Q_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Q_regularizer": [null, null, null, null, null, null],
"Q_constraint": [null, null, null, null, null, null],
"Q_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"q_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"q_regularizer": [null, null, null, null, null, null],
"q_constraint": [null, null, null, null, null, null],
"K_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"K_regularizer": [null, null, null, null, null, null],
"K_constraint": [null, null, null, null, null, null],
"K_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"k_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"k_regularizer": [null, null, null, null, null, null],
"k_constraint": [null, null, null, null, null, null],
"V_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"V_regularizer": [null, null, null, null, null, null],
"V_constraint": [null, null, null, null, null, null],
"v_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"v_regularizer": [null, null, null, null, null, null],
"v_constraint": [null, null, null, null, null, null],
"ThetaA_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaA_regularizer": [null, null, null, null, null, null],
"ThetaA_constraint": [null, null, null, null, null, null],
"thetaA_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaA_regularizer": [null, null, null, null, null, null],
"thetaA_constraint": [null, null, null, null, null, null],
"ThetaTildeA_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaTildeA_regularizer": [null, null, null, null, null, null],
"ThetaTildeA_constraint": [null, null, null, null, null, null],
"thetaTildeA_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaTildeA_regularizer": [null, null, null, null, null, null],
"thetaTildeA_constraint": [null, null, null, null, null, null],
"deltaA_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"ThetaB_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaB_regularizer": [null, null, null, null, null, null],
"ThetaB_constraint": [null, null, null, null, null, null],
"thetaB_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaB_regularizer": [null, null, null, null, null, null],
"thetaB_constraint": [null, null, null, null, null, null],
"ThetaTildeB_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaTildeB_regularizer": [null, null, null, null, null, null],
"ThetaTildeB_constraint": [null, null, null, null, null, null],
"thetaTildeB_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaTildeB_regularizer": [null, null, null, null, null, null],
"thetaTildeB_constraint": [null, null, null, null, null, null],
"deltaB_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"Omega_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Omega_regularizer": [null, null, null, null, null, null],
"Omega_constraint": [null, null, null, null, null, null],
"omega_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"omega_regularizer": [null, null, null, null, null, null],
"omega_constraint": [null, null, null, null, null, null],
"omega_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"OmegaTilde_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"OmegaTilde_regularizer": [null, null, null, null, null, null],
"OmegaTilde_constraint": [null, null, null, null, null, null],
"omegaTilde_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"omegaTilde_regularizer": [null, null, null, null, null, null],
"omegaTilde_constraint": [null, null, null, null, null, null],
"hourglass_wrapper": {
"internal_dim": [2, 2, 4, 16, 32, 64],
"parallel_internal_dim": [8, 8, 16, 32, 64, 128],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"activation2": [null, null, null, null, null, null],
"activate_postwrap": true,
"activate_residual": false,
"regularize": [true, true, true, true, true, true],
"W1_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W1_regularizer": [null, null, null, null, null, null],
"W1_constraint": [null, null, null, null, null, null],
"W2_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W2_regularizer": [null, null, null, null, null, null],
"W2_constraint": [null, null, null, null, null, null],
"loss_factor": 0.1,
"subspace_factor": 0.125,
"feature_dim_divisor": 4,
"bn": false,
"merge_bn": false,
"bn_momentum": 0.98,
"out_bn": true,
"out_bn_momentum": 0.98,
"out_activation": "relu"
}
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"conv1d": false,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 32,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 1000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/PointTransformer.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The JSON above defines a ConvAutoencPwiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D spherical neighborhood
to prepare the input for a GroupedPointTransformer-based model. It uses
GroupedPointTransformerLayer for feature extraction,
FeaturesDownsamplingLayer for downsampling with mean filter,
and analogously also FeaturesUpsamplingLayer for mean-based
upsampling.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.- –
fnames - –
random_seed - –
model_args The model specification.
- –
fnames - –
num_classes - –
class_names - –
pre_processing - –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "GroupedPointTransformer"is given below. For a description of the case when"type": "PointNet"see the PointNet operator documentation, for the case"type": "KPConv"see the KPConv operator documentation, to mimic a SFL-NET model see the SFL-NET documentation, for the case"type": "LightKPConv"see the LightKPConv operator documentation, and to mimic a PointTransformed model see the PointTransformer documentation.- –
operations_per_depth - –
feature_space_dims - –
bn - –
bn_momentum - –
activate
- –
init_ftransf_bn The batch normalization for the feature transform before the grouped point transformer-based feature extraction. It can be enabled with
Trueor disabled withFalse. Note that it is applied also before any wrapper block (if any).
- –
init_ftransf_bn_momentum The momentum governing how to update the standardization parameters for the batch normalization before the grouped point transformer-based feature extraction. See the Hierarchical PointNet bn_momentum documentation for further details.
- –
groups The number of groups at each depth. Note that it must be a divisor for the number of channels at that depth.
- –
dropout_rate The ratio in \([0, 1]\) governing how many weight encoding units must be randomly disabled during training.
- –
Q_initializer The initialization method for the \(\pmb{Q}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
Q_regularizer The regularization strategy for the \(\pmb{Q}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
Q_constraint The constraints of the \(\pmb{Q}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
q_initializer The initialization method for the \(\pmb{q}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
q_regularizer The regularization method for the \(\pmb{q}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
q_constraint The constraint method for the \(\pmb{q}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
K_initializer The initialization method for the \(\pmb{K}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
K_regularizer The regularization strategy for the \(\pmb{K}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
K_constraint The constraints of the \(\pmb{K}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
k_initializer The initialization method for the \(\pmb{k}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
k_regularizer The regularization method for the \(\pmb{k}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
k_constraint The constraint method for the \(\pmb{k}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
V_initializer The initialization method for the \(\pmb{V}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
V_regularizer The regularization strategy for the \(\pmb{V}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
V_constraint The constraints of the \(\pmb{V}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
v_initializer The initialization method for the \(\pmb{v}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
v_regularizer The regularization method for the \(\pmb{v}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
v_constraint The constraint method for the \(\pmb{v}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
ThetaA_initializer The initialization method for the \(\pmb{\Theta_A}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
ThetaA_regularizer The regularization strategy for the \(\pmb{\Theta_A}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
ThetaA_constraint The constraints of the \(\pmb{\Theta_A}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
thetaA_initializer The initialization method for the \(\pmb{\theta_A}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
thetaA_regularizer The regularization method for the \(\pmb{\theta_A}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
thetaA_constraint The constraint method for the \(\pmb{\theta_A}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
ThetaTildeA_initializer The initialization method for the \(\pmb{\widetilde{\Theta}_A}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
ThetaTildeA_regularizer The regularization strategy for the \(\pmb{\widetilde{\Theta}_A}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
ThetaTildeA_constraint The constraints of the \(\pmb{\widetilde{\Theta}_A}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
thetaTildeA_initializer The initialization method for the \(\pmb{\tilde{\theta}_A}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
thetaTildeA_regularizer The regularization method for the \(\pmb{\tilde{\theta}_A}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
thetaTildeA_constraint The constraint method for the \(\pmb{\tilde{\theta}_A}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
deltaA_bn_momentum The momentum for the batch normalization of the multiplier positional encoding. See the Hierarchical PointNet bn_momentum documentation for further details.
- –
ThetaB_initializer The initialization method for the \(\pmb{\Theta_B}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
ThetaB_regularizer The regularization strategy for the \(\pmb{\Theta_B}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
ThetaB_constraint The constraints of the \(\pmb{\Theta_B}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
thetaB_initializer The initialization method for the \(\pmb{\theta_B}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
thetaB_regularizer The regularization method for the \(\pmb{\theta_B}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
thetaB_constraint The constraint method for the \(\pmb{\theta_B}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
ThetaTildeB_initializer The initialization method for the \(\pmb{\widetilde{\Theta}_B}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
ThetaTildeB_regularizer The regularization strategy for the \(\pmb{\widetilde{\Theta}_B}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
ThetaTildeB_constraint The constraints of the \(\pmb{\widetilde{\Theta}_B}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
thetaTildeB_initializer The initialization method for the \(\pmb{\tilde{\theta}_B}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
thetaTildeB_regularizer The regularization method for the \(\pmb{\tilde{\theta}_B}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
thetaTildeB_constraint The constraint method for the \(\pmb{\tilde{\theta}_B}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
deltaB_bn_momentum The momentum for the batch normalization of the bias positional encoding. See the Hierarchical PointNet bn_momentum documentation for further details.
- –
Omega_initializer The initialization method for the \(\pmb{\Omega}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
ThetaA_regularizer The regularization strategy for the \(\pmb{\Omega}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
Omega_constraint The constraints of the \(\pmb{\Omega}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
omega_initializer The initialization method for the \(\pmb{\omega}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
omega_regularizer The regularization method for the \(\pmb{\omega}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
omega_constraint The constraint method for the \(\pmb{\omega}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
OmegaTilde_initializer The initialization method for the \(\pmb{\widetilde{\Omega}}\) weights matrix of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
OmegaTilde_regularizer The regularization strategy for the \(\pmb{\widetilde{\Omega}}\) weights matrix of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
OmegaTilde_constraint The constraints of the \(\pmb{\widetilde{\Omega}}\) weights matrix of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
omegaTilde_initializer The initialization method for the \(\pmb{\tilde{\omega}}\) weights vector of each GroupedPointTransformer. See the keras documentation on initializers for more details.
- –
omegaTilde_regularizer The regularization method for the \(\pmb{\tilde{\omega}}\) weights vector of each GroupedPointTransformer. See the keras documentation on regularizers for more details.
- –
omegaTilde_constraint The constraint method for the \(\pmb{\tilde{\omega}}\) weights vector of each GroupedPointTransformer. See the keras documentation on constraints for more details.
- –
omega_bn_momentum The momentum for the batch normalization of the weight encoding. See the Hierarchical PointNet bn_momentum documentation for further details.
- –
unary_convolution_wrapper It can be used to configure a LightKPconv model that uses shared MLPs to wrap the feature extraction operators like a KPConv model or it can be set to null to use an
hourglass_wrapperinstead, similar to a SFL-NET model. See the KPConv arguments documentation for further details.- –
hourglass_wrapper The specification of how to use hourglass layers to wrap the feature extraction layers. See the SFL-NET arguments documentation for further details.
- –
point_transformer_wrapper The specification of how to use Point Transformer layers to wrap the feature extraction layers (with/out residual block). See the PointTransformer arguments documentation.
- –
- –
features_alignment - –
downsampling_filter It can be configured to
"strided_lightkpconv"(seeStridedLightKPConvLayer) but it is also possible to use"strided_kpconv"to use the classicalStridedKPConvLayerduring downsampling. TheFeaturesDownsamplingLayerandInterdimensionalPointTransformerLayerare also supported.- –
upsampling_filter The original upsampling strategy for KPConv and derived architectures is
"nearest"(i.e., nearest upsampling). However, in VL3D++ examples we often use"mean"for our baseline models because we found it yields better results. SeeFeaturesUpsamplingLayerandInterdimensionalPointTransformerLayerfor more details.- –
upsampling_bn - –
upsampling_momentum - –
conv1d Boolean flag governing whether to use unary convolutions (shared MLPs) to wrap the hourglass or not. SFL-NET models use hourglass layers instead (i.e.,
False), classical KPConv models use shared MLPs instead (i.e.,True).- –
conv1d_kernel_initializer - –
output_kernel_initializer
- –
model_handling The model handling specification can be read in the KPConv arguments documentation.
- –
compilation_args
- –
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_confusion_matrix_report_path - –
training_confusion_matrix_report_plot - –
training_class_distribution_report_path - –
training_classified_point_cloud_path - –
training_activations_path
Hierarchical feature extraction with PointMLP
The ConvAutoencPwiseClassif architecture can be configured using
PointMLPLayer as the feature extraction strategy.
For further details about the variables see the
PointMLPLayer class documentation and
the PointMLP paper (Xu Ma et al., 2022).
The JSON below illustrates how to configure PointMLP-based hierarchical feature extractors using the VL3D++ framework.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pointmlp_dumean_neck_ctxhead/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "PointMLP",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 96, 128, 192, 256],
"bn": true,
"bn_momentum": 0.90,
"activate": true,
"groups": [4, 4, 4, 4, 4, 4],
"Phi_blocks": [2, 2, 2, 2, 2, 2],
"Phi_residual_expansion": [2, 2, 2, 2, 2, 2],
"Phi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Phi_regularizer": [null, null, null, null, null, null],
"Phi_constraint": [null, null, null, null, null, null],
"Phi_bn": [true, true, true, true, true, true],
"Phi_bn_momentum": [0.90, 0.90, 0.90, 0.90, 0.90, 0.90],
"Psi_blocks": [2, 2, 2, 2, 2, 2],
"Psi_residual_expansion": [2, 2, 2, 2, 2, 2],
"Psi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Psi_regularizer": [null, null, null, null, null, null],
"Psi_constraint": [null, null, null, null, null, null],
"Psi_bn": [true, true, true, true, true, true],
"Psi_bn_momentum": [0.90, 0.90, 0.90, 0.90, 0.90, 0.90]
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.90,
"conv1d": true,
"conv1d_kernel_initializer": "glorot_normal",
"neck":{
"max_depth": 2,
"hidden_channels": [64, 64],
"kernel_initializer": ["glorot_uniform", "glorot_uniform"],
"kernel_regularizer": [null, null],
"kernel_constraint": [null, null],
"bn_momentum": [0.90, 0.90],
"activation": ["relu", "relu"]
},
"output_kernel_initializer": "glorot_normal",
"contextual_head": {
"max_depth": 2,
"hidden_channels": [64, 64],
"output_channels": [64, 64],
"bn": [true, true],
"bn_momentum": [0.90, 0.90],
"bn_along_neighbors": [true, true],
"activation": ["relu", "relu"],
"distance": ["euclidean", "euclidean"],
"ascending_order": [true, true],
"aggregation": ["max", "max"],
"initializer": ["glorot_uniform", "glorot_uniform"],
"regularizer": [null, null],
"constraint": [null, null]
},
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2250,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": false,
"show_layer_names": true,
"rankdir": "LR",
"expand_nested": false,
"dpi": 200,
"show_layer_activations": false
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/PointMLP.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The JSON above defines a ConvAutoencPwiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D spherical neighborhood
to prepare the input for a PointMLP-based model. It uses
PointMLPLayer for feature extraction,
FeaturesDownsamplingLayer for downsampling with mean filter,
analogously also FeaturesUpsamplingLayer for mean-based
upsampling, a neck before the head, and a contextual head after the standard
segmentation head based on ContextualPointLayer.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.- –
fnames - –
random_seed - –
model_args The model specification.
- –
fnames - –
num_classes - –
class_names - –
pre_processing - –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "PointMLP"is given below. For a description of the case when"type": "PointNet"see the PointNet operator documentation, for the case"type": "KPConv"see the KPConv operator documentation, to mimic a SFL-NET model see the SFL-NET documentation, for the case"type": "LightKPConv"see the LightKPConv operator documentation, to mimic a PointTransformer model see the PointTransformer documentation, and to mimic a GroupedPointTransformer model see the GroupedPointTransformer documentation.- –
operations_per_depth - –
feature_space_dims - –
bn - –
bn_momentum - –
activate - –
groups The number of groups into which divide the features at each depth. Note that it must divide both the number of input and output features.
- –
Phi_blocks The number of blocks for the residual shared MLPs at each depth.
- –
Phi_residual_expansion The factor multiplying the number of output features in the internal representations at each depth.
- –
Phi_initializer The initialization method for the weights of the \(\Phi\) shared MLPs at each depth. See the keras documentation on initializers for more details.
- –
Phi_regularizer The regularization method for the weights of the \(\Phi\) shared MLPs at each depth. See the keras documentation on regularizers for more details.
- –
Phi_constraint The constraint for the weights of the \(\Phi\) shared MLPs at each depth. See the keras documentation on constraints for more details.
- –
Phi_bn Whether to enable the batch normalization for the \(\Phi\) shared MLPs at each depth.
- –
Phi_bn_momentum The momentum for the batch normalization of the \(\Phi\) shared MLPs. See the Hierarchical PointNet bn_momentum documentation for further details.
- –
Psi_blocks The number of blocks for the final residual shared MLPs \(\Psi\).
- –
Psi_residual_expansion The factor multiplying the number of output features in the internal representations of the final residual shared MLPs at each depth.
- –
Psi_initializer The initialization method for the weights of the \(\Psi\) shared MLPs at each depth. See the keras documentation on initializers for more details.
- –
Psi_regularizer The regularization method for the weights of the \(\Psi\) shared MLPs at each depth. See the keras documentation on regularizers for more details.
- –
Psi_constraint The constraint for the weights of the \(\Psi\) shared MLPs at each depth. See the keras documentation on constraints for more details.
- –
Psi_bn Whether to enable the batch normalization for the \(\Psi\) shared MLPs at each depth.
- –
Psi_bn_momentum The momentum for the batch normalization of the \(\Psi\) shared MLPs. See the Hierarchical PointNet bn_momentum documentation for further details.
- –
- –
features_alignment - –
downsampling_filter The type of downsampling filter. See
StridedKPConvLayer,StridedLightKPConvLayer,FeaturesDownsamplingLayer, andInterdimensionalPointTransformerLayerfor more details.- –
upsampling_filter The type of upsampling filter. See
FeaturesUpsamplingLayerandInterdimensionalPointTransformerLayerfor more details.- –
upsampling_bn Boolean flag to decide whether to enable batch normalization for upsampling transformations.
- –
upsampling_momentum Momentum for the moving average of the upsampling batch normalization, such that
new_mean = old_mean * momentum + batch_mean * (1-momentum). See the Keras documentation on batch normalization for more details.- –
conv1d Boolean flag governing whether to use unary convolutions (shared MLPs) to wrap the hourglass or not. SFL-NET models use hourglass layers instead (i.e.,
False), classical KPConv models use shared MLPs instead (i.e.,True).- –
conv1d_kernel_initializer The initialization method for the 1D convolutions during upsampling. See the keras documentation on initializers for more details.
- –
neck - –
output_kernel_initializer - –
contextual_head The specification of the contextual head as specified in the contextual head documentation.
- –
model_handling Define how to handle the model, i.e., not the architecture itself but how it must be used. See the description of PointNet model handling for more details.
- –
compilation_args - –
architecture_graph_paths - –
architecture_graph_args
- –
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_class_confusion_matrix_report_path - –
training_class_confusion_matrix_plot_path - –
training_class_distribution_report_path - –
training_class_distribution_plot_path - –
training_classified_point_cloud_path - –
training_activations_path
Hierarchical feature extraction with KPConvX
The ConvAutoencPwiseClassif architecture can be configured using
KPConvXLayer as the feature extraction strategy.
For further details about the variables see the KPConvXLayer class
documentation and
the KPConvX paper (Thomas et al., 2024).
The JSON below illustrates how to configure KPConvX-based hierarchical feature extractors using the VL3D++ framework.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpconvx_dumean_neck_full_droppath/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [2048, 512, 256, 128, 32],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 12, 16, 20, 20],
"num_pwise_neighbors": [12, 16, 20, 20, 20],
"num_upsampling_neighbors": [1, 12, 16, 20, 20],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "KPConvX",
"kpconv":{
"feature_space_dims": 64,
"sigma": 5.0,
"kernel_radius": 5.0,
"num_kernel_points": 17,
"deformable": false,
"W_initializer": "he_uniform",
"W_regularizer": null,
"W_constraint": null,
"bn": true,
"bn_momentum": 0.90,
"activate": true
},
"operations_per_depth": [1, 1, 1, 1, 1],
"drop_path": 0.33,
"blocks": [3, 3, 9, 12, 3],
"feature_space_dims": [64, 96, 128, 192, 256],
"hidden_feature_space_dims": [256, 384, 512, 768, 1024],
"sigma": [5.0, 5.0, 5.0, 5.0, 5.0],
"shell_radii": [[0, 2.5, 5.0], [0, 2.5, 5.0], [0, 2.5, 5.0], [0, 2.5, 5.0], [0, 2.5, 5.0]],
"shell_points": [[1, 14, 28], [1, 14, 28], [1, 14, 28], [1, 14, 28], [1, 14, 28]],
"bn": [true, true, true, true, true],
"bn_momentum": [0.90, 0.90, 0.90, 0.90, 0.90],
"activate": [true, true, true, true, true],
"groups": [8, 8, 8, 8, 8],
"deformable": [false, false, false, false, false],
"initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"regularizer": [null, null, null, null, null],
"constraint": [null, null, null, null, null]
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.90,
"conv1d": false,
"conv1d_kernel_initializer": "he_uniform",
"upsampling_kpconvx": {
"drop_path": 0.33,
"blocks": [1, 1, 1, 1],
"hidden_feature_space_dims": [256, 384, 512, 768],
"sigma": [5.0, 5.0, 5.0, 5.0],
"shell_radii": [[0, 2.5, 5.0], [0, 2.5, 5.0], [0, 2.5, 5.0], [0, 2.5, 5.0]],
"shell_points": [[1, 14, 28], [1, 14, 28], [1, 14, 28], [1, 14, 28]],
"bn_momentum": [0.90, 0.90, 0.90, 0.90],
"activate": [true, true, true, true],
"groups": [8, 8, 8, 8],
"deformable": [false, false, false, false],
"initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"regularizer": [null, null, null, null],
"constraint": [null, null, null, null]
},
"neck":{
"max_depth": 2,
"hidden_channels": [64, 64],
"kernel_initializer": ["he_uniform", "he_uniform"],
"kernel_regularizer": [null, null],
"kernel_constraint": [null, null],
"bn_momentum": [0.90, 0.90],
"activation": ["relu", "relu"]
},
"output_kernel_initializer": "he_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"kpconvx_representation_dir": "*/training_eval/kpconvx_layers/",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 24,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "AdamW",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 3333,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy",
"f1"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/KPConvX.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The JSON above defines a ConvAutoencPwiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D spherical neighborhood
to prepare the input for a KPConvX-based model. It usess
KPConvLayer for the initial feature extraction stage,
KPConvXLayer with many blocks for encoding feature extraction
stages, and a single block KPConvXLayer for decoding feature
extraction stages.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details read the training strategies section.- –
fnames - –
random_seed - –
model_args The model specification.
- –
fnames - –
num_classes - –
class_names - –
pre_processing - –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "KPConvX"is given below. For a description of the case when"type": "PointNet"see the PointNet operator documentation, for the case"type": "KPConv"see the KPConv operator documentation, to mimic a SFL-NET model see the SFL-NET documentation, for the case"type": "LightKPConv"see the LightKPConv operator documentation, to mimic a PointTransformer model see the PointTransformer documentation, and to mimic a GroupedPointTransformer model see the GroupedPointTransformer documentation.- –
kpconv The specification for the initial
KPConvLayer`feature extractor.- –
feature_space_dims - –
sigma - –
kernel_radius - –
num_kernel_points - –
deformable - –
W_initializer The initialization method for the weights of the initial KPConv. See the keras documentation on initializers for more details.
- –
W_regularizer The regularization strategy for weights of the initial KPConv. See the keras documentation on regularizers for more details.
- –
W_constraint The constraints of the weights of the initial KPConv. See the keras documentation on constraints for more details.
- –
bn - –
bn_momentum - –
activate
- –
- –
operations_per_depth How many
KPConvXLayermust be placed at each depth of the decoding hierarchy. Note that, contrary to other feature extractors, it is recommended to put exactly one operation per depth and tweak the number of blocks per depth to increase or reduce the depth of each feature extractor.
- –
drop_path The probability to ignore (only during training) a block from
KPConvXLayerlayers. Note that \(0\) means no drop path at all while \(1\) implies dropping all blocks.
- –
blocks A list with the number of blocks for each
KPConvXLayerat each decoding depth.
- –
feature_space_dims
- –
sigma The influence distance of the kernel points for each KPConvX.
- –
shell_radii The radius for each spherical shell composing the structure space (aka support points) of each kernel.
- –
shell_points The number of points for each spherical shell composing the structure space (aka support points) of each kernel.
- –
bn Whether to enable batch normalization (
True) or not (False).
- –
bn_momentum Momentum for the moving average of the batch normalization, such that
new_mean = old_mean * momentum + batch_mean * (1 - momentum). See the Keras documentation on batch normalization for more details.
- –
activate Trueto activate the output of the KPConvX,Falseotherwise.
- –
groups The number of groups for the input channels. Note that it must divide the dimensionality of the input feature space.
- –
deformable Whether the structure space of the KPConvX will be optimized (
True) or not (False), for each KPConv.
- –
initializer The initialization method for the weights of each KPConvX. See the keras documentation on initializers for more details.
- –
regularizer The regularization strategy for weights of each KPConvX. See the keras documentation on regularizers for more details.
- –
constraint The constraints of the weights of each KPConvX. See the keras documentation on constraints for more details.
- –
- –
features_alignment - –
downsampling_filter It can be configured to
"strided_lightkpconv"(seeStridedLightKPConvLayer) but it is also possible to use"strided_kpconv"to use the classicalStridedKPConvLayerduring downsampling. TheFeaturesDownsamplingLayerandInterdimensionalPointTransformerLayerare also supported.- –
upsampling_filter See
FeaturesUpsamplingLayerandInterdimensionalPointTransformerLayerfor more details.- –
upsampling_bn - –
upsampling_momentum - –
conv1d Boolean flag governing whether to use unary convolutions (shared MLPs) to wrap the hourglass or not.
- –
conv1d_kernel_initializer - –
upsampling_kpconvx The upsampling
KPConvXLayerat each depth. Note that it can benullto avoid using KPConvX as decoding feature extractor. Also, the number of upsampling KPConvX layers is the number of encoding KPConvX layers minus one.- –
drop_path - –
blocks See KPConvX arguments documentation. Note that for the decoder the recommended number of blocks is one.
- –
hidden_feature_space_dims - –
sigma - –
shell_radii - –
shell_points - –
bn_momentum - –
activate - –
groups - –
deformable - –
initializer - –
regularizer - –
constraint
- –
- –
neck - –
output_kernel_initializer - –
contextual_head The specification of the contextual head as specified in the contextual head documentation.
- –
model_handling Define how to handle the model, i.e., not the architecture itself but how it must be used. See the description of PointNet model handling for more details.
- –
kpconvx_representation_dir Path where the plots and CSV data representing the KPConvX kernels will be stored.
- –
- –
compilation_args - –
architecture_graph_paths - –
architecture_graph_args
- –
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_class_confusion_matrix_report_path - –
training_class_confusion_matrix_plot_path - –
training_class_distribution_report_path - –
training_class_distribution_plot_path - –
training_classified_point_cloud_path - –
training_activations_path
Hierarchical feature extraction with ContextNet
The ConvAutoencPwiseClassif architecture can be configured using
ContextualPointLayer as the feature extraction strategy.
This architecture considers three different levels of contextual information
for each point: 1) The global features derived for all the input points
(\(\pmb{G} \in \mathbb{R}^{R \times D_H}\)),
2) the local features derived from the topological information of each local
neighborhood (\(\mathcal{H} \in \mathbb{R}^{R \times \kappa \times D_H}\)),
and 3) the local features derived from topological and geometric information
in the local neighborhood, i.e., considering the distances too
(\(\mathcal{\widetilde{H}} \in \mathbb{R}^{R \times \kappa \times D_H}\)).
Note that this architecture was developed in the context of the
VirtuaLearn3D++ framework.
The JSON below illustrates how to configure a ContextNet-based hierarchical feature extractors using the VL3D++ framework.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/contextual_dumean_neck_head/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "Contextual",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 96, 128, 192, 256],
"hidden_channels": [128, 128, 192, 256, 384, 512],
"bn": [true, true, true, true, true, true],
"bn_momentum": [0.95, 0.95, 0.95, 0.95, 0.95, 0.95],
"bn_along_neighbors": [true, true, true, true, true, true],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"distance": ["euclidean", "euclidean", "euclidean", "euclidean", "euclidean", "euclidean"],
"ascending_order": [true, true, true, true, true, true],
"aggregation": ["mean", "mean", "mean", "mean", "mean", "mean"],
"initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"regularizer": [null, null, null, null, null, null],
"constraint": [null, null, null, null, null, null],
"activate": true
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.95,
"conv1d": true,
"conv1d_kernel_initializer": "he_uniform",
"neck":{
"max_depth": 2,
"hidden_channels": [64, 64],
"kernel_initializer": ["he_uniform", "he_uniform"],
"kernel_regularizer": [null, null],
"kernel_constraint": [null, null],
"bn_momentum": [0.95, 0.95],
"activation": ["relu", "relu"]
},
"contextual_head": {
"multihead": false,
"max_depth": 2,
"hidden_channels": [64, 64],
"output_channels": [64, 64],
"bn": [true, true],
"bn_momentum": [0.95, 0.95],
"bn_along_neighbors": [true, true],
"activation": ["relu", "relu"],
"distance": ["euclidean", "euclidean"],
"ascending_order": [true, true],
"aggregation": ["mean", "mean"],
"initializer": ["he_uniform", "he_uniform"],
"regularizer": [null, null],
"constraint": [null, null]
},
"output_kernel_initializer": "he_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "AdamW",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2500,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy",
"f1"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/ContextNet.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The JSON above defines a ConvAutoencPWiseClassif that uses a
hierarchical furthest point sampling strategy with a 3D spherical neighborhood
to prepare the input for a ContextNet-based model. It uses
ContextualPointLayer for feature extraction, a neck with depth 2,
and a contextual head. The decoder uses Shared MLPs (as Conv1D blocks with
unitary kernel). Both, downsampling and upsampling, compute the mean value
for each local neighborhood.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details read the training strategies section.- –
fnames - –
random_seed - –
model_args The model specification.
- –
fnames - –
num_classes - –
class_names - –
pre_processing - –
feature_extraction The definition of the feature extraction operator. A detailed description of the case when
"type": "Contextual"is given below. For a description of the case when"type": "PointNet"see the PointNet operator documentation, for the case"type": "KPConv"see the KPConv operator documentation, to mimic a SFL-NET model see the SFL-NET documentation, for the case"type": "LightKPConv"see the LightKPConv operator documentation, to mimic a PointTransformer model see the PointTransformer documentation, to mimic a GroupedPointTransformer model see the GroupedPointTransformer documentation, and to mimic a KPConvX model see the KPConvX documentation.- –
operations_per_depth - –
feature_space_dims - –
hidden_channels A list with the dimensionality of the hidden feature space for each
ContextualPointLayerin the encoding hierarchy.- –
bn - –
bn_momentum - –
bn_along_neighbors Whether to compute the match normalization along the neighbors (
true) or the feature (false). Note that this applies for tensors such as \(\mathcal{H} \in \mathbb{R}^{R \times \kappa \times D_H}\) or \(\mathcal{\widehat{H}} \in \mathbb{R}^{R \times \kappa \times D_H}\) because they represent \(\kappa\) neighbors for each point.- –
activation A list with the activation function for each contextual point layer. See the keras documentation on activations for more details.
- –
distance A list with the distance that must be used at each contextual point layer. Supported values are
"euclidean"and"squared".- –
ascending_order Whether to force distance-based ascending order of the neighborhoods (
true) or not (false).- –
aggregation A list with the aggregation strategy for each contextual point layer, either
"max"or"mean".- –
initializer A list with the initializer for the matrices and vectors of weights. See Keras documentation on layer initializers for further details.
- –
regularizer A list with the regularizer for the matrices and vectors of weights. See the keras documentation on regularizers for more details.
- –
constraint A list with the constraint for the matrices and vectors of weights. See the keras documentation on constraints for more details.
- –
activate
- –
- –
features_alignment - –
downsampling_filter It can be configured to
"strided_lightkpconv"(seeStridedLightKPConvLayer) but it is also possible to use"strided_kpconv"to use the classicalStridedKPConvLayerduring downsampling. TheFeaturesDownsamplingLayerandInterdimensionalPointTransformerLayerare also supported.- –
upsampling_filter See
FeaturesUpsamplingLayerandInterdimensionalPointTransformerLayerfor more details.- –
upsampling_bn - –
upsampling_momentum - –
conv1d Boolean flag governing whether to use unary convolutions (shared MLPs) to wrap the hourglass or not.
- –
conv1d_kernel_initializer - –
neck - –
contextual_head The specification of the contextual head as specified in the contextual head documentation.
- –
output_kernel_initializer - –
model_handling Define how to handle the model, i.e., not the architecture itself but how it must be used. See the description of PointNet model handling for more details.
- –
compilation_args - –
architecture_graph_path - –
architecture_graph_args
- –
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_class_confusion_matrix_report_path - –
training_class_confusion_matrix_plot_path - –
training_class_distribution_report_path - –
training_class_distribution_plot_path - –
training_classified_point_cloud_path - –
training_activations_path
Sparse 3D convolutional point-wise classifier
The SpConv3DPwiseClassif architecture transforms the point cloud
through a sparse hierarchical voxelization through the
HierarchicalSGPreProcessorPP pre-processor
(see the hierarchical sparse grid receptive field documentation).
Typically, dense voxelizations representing 3D point clouds demand more memory
than available due to the curse of dimensionality. This issue was discussed
in the
Submanifold Saprse Convolutional Networks
and
3D Semantic Segmentation with Submanifold Sparse Convolutional Networks
papers by Benjamin Graham et al. In the VirtuaLearn3D++ framework sparse
convolutional neural networks are implemented through
SpConv3DEncodingLayer and SpConv3DDecodingLayer or,
alternatively, through the SubmanifoldSpConv3DLayer,
DownsamplingSpConv3DLayer, and UpsamplingSpConv3DLayer.
The sparse-to-dense indexing maps are implemented through the
SparseIndexingMapLayer.
On top of that, the loss function must be a ragged one that can work with
inputs of different dimensionality (see
the ragged losses documentation for further
details). The JSON below illustrates how to configure
neural networks using 3D convolutions on sparse voxelizations of 3D point clouds
using the VL3D framework.
{
"train": "SparseConvolutional3DPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_sg",
"support_strategy_num_points": 4096,
"support_strategy": "fps",
"support_strategy_fast": 4,
"center_on_pcloud": true,
"training_class_distribution": [500, 500, 500, 500, 500, 500, 500, 500, 500, 500, 500],
"neighborhood": {
"type": "sphere",
"radius": 16.0,
"separation_factor": 0.8
},
"cell_size": 0.25,
"submanifold_window": [2, 1, 1, 1],
"downsampling_window": [2, 2, 2],
"downsampling_stride": [2, 2, 2],
"upsampling_window": [2, 2, 2],
"upsampling_stride": [2, 2, 2],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": null
},
"layer_by_layer": false,
"initial_shared_mlp": true,
"initial_shared_mlp_initializer": "glorot_normal",
"initial_shared_mlp_regularizer": null,
"initial_shared_mlp_constraint": null,
"initial_unactivated_spconv": false,
"spconvs_per_encoder": 1,
"submanifold_filters": [32, 64, 96, 128],
"submanifold_features": [64, 128, 256, 512],
"submanifold_initializer": ["glorot_normal", "glorot_normal", "glorot_normal", "glorot_normal"],
"submanifold_regularizer": [null, null, null, null],
"submanifold_constraint": [null, null, null, null],
"submanifold_bn_momentum": [0.9, 0.9, 0.9, 0.9],
"downsampling_initializer": ["glorot_normal", "glorot_normal", "glorot_normal"],
"downsampling_regularizer": [null, null, null],
"downsampling_constraint": [null, null, null],
"downsampling_bn_momentum": [0.9, 0.9, 0.9],
"upsampling_initializer": ["glorot_normal", "glorot_normal", "glorot_normal"],
"upsampling_regularizer": [null, null, null],
"upsampling_constraint": [null, null, null],
"upsampling_bn_momentum": [0.9, 0.9, 0.9],
"upsampling_shared_mlp_initializer": ["glorot_normal", "glorot_normal", "glorot_normal"],
"upsampling_shared_mlp_regularizer": [null, null, null],
"upsampling_shared_mlp_constraint": [null, null, null],
"upsampling_shared_mlp_activation": ["relu", "relu", "relu"],
"upsampling_shared_mlp_bn_momentum": [0.9, 0.9, 0.9],
"feature_dim_divisor": 2,
"dim_transform_kernel_initializer": "glorot_normal",
"dim_transform_kernel_regularizer": null,
"dim_transform_kernel_constraint": null,
"dim_transform_activation": "relu",
"dim_transform_bn_momentum": 0.9,
"residual_strategy": "sharedmlp",
"post_residual_shared_mlp": false,
"residual_shared_mlp_kernel_initializer": "glorot_normal",
"residual_shared_mlp_kernel_regularizer": null,
"residual_shared_mlp_kernel_constraint": null,
"residual_shared_mlp_activation": "relu",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"features_structuring_representation_dir": null,
"class_weight": null,
"training_epochs": 200,
"batch_size": 4,
"training_sequencer": {
"type": "DLSparseShadowSequencer",
"random_shuffle_indices": true
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2500,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "ragged_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
}
The JSON above defines a SpConv3DPwiseClassif that uses a hierarchical
sparse 3D grid to represent spherical neighborhoods with radius of \(16\)
meters in a 3D point cloud. It has a max depth of four with \(64\) features
and \(32\) filters in the first level and \(512\) features and
\(128\) filters in the lowest one.
Arguments
- –
training_type Typically it should be
"base"for neural networks. For further details, read the training strategies section.- –
fnames - –
random_seed - –
model_args The model specification.
- –
fnames - –
num_classes - –
class_names - –
pre_processing The hierarchical sparse 3D convonlutional model demands hierarchical sparse grids as the receptive field strategy. See the hierarchical SG documentation for further details.
- –
layer_by_layer Enable (
true) the layer-by-layer definition of the architecture which is typically slower but easier to analyze or disable it (false). Note thatfalseis recommended astrueis expected to be used only for development and debugging purposes.- –
initial_shared_mlp Whether to apply a shared MLP to the input data to transform it before computing the sparse convolutional hierarchy (
true) or not (false).- –
initial_shared_mlp_initializer The initialization method for the initial SharedMLP. See the keras documentation on initializers for more details.
- –
initial_shared_mlp_regularizer The regularization strategy for the weights of the initial SharedMLP. See the keras documentation on regularizers for more details.
- –
initial_shared_mlp_constraint The constraints of the weights of the initial SharedMLP. See the keras documentation on constraints for more details.
- –
initial_unactivated_spconv Whether to apply a sparse convolution before the activation of the input (
true) or not (false).- –
spconvs_per_encoder Integer governing how many sparse convolutions compute for each encoding block.
- –
submanifold_filters List of integers governing how many filters are involved in the sparse submanifold convolution at each level of the hierarchy.
- –
submanifold_features List of integers governing how many output filters are generated through sparse submanifold convolutions at each level of the hierarchy.
- –
submanifold_initializer List with the initializer for the weights of each sparse submanifold convolution in the hierarchy. See the keras documentation on initializers for more details.
- –
submanifold_regularizer List with the regularizer for the weights of each sparse submanifold convolution in the hierarchy. See the keras documentation on regularizers for more details.
- –
submanifold_constraint List with the constraints for the weights of each sparse submanifold convolution in the hierarchy. See the keras documentation on constraints for more details.
- –
submanifold_bn_momentum Momentum for the moving average of the batch normalization. Note that for sparse convolutions the normalization is currently carried out independently for each element in the batch.
- –
downsampling_initializer List with the initializer for the weights of each sparse downsampling convolution in the hierarchy. See the keras documentation on initializers for more details.
- –
downsampling_regularizer List with the regularizer for the weights of each sparse downsampling convolution in the hierarchy. See the keras documentation on regularizers for more details.
- –
downsampling_constraint List with the constraints for the weights of each sparse downsampling convolution in the hierarchy. See the keras documentation on constraints for more details.
- –
downsampling_bn_momentum List with the momentum for the moving average of the batch normalization for each sparse downsampling convolution. Note that the normalization is currently carried out independently for each element in the batch.
- –
upsampling_initializer List with the initializer for the weights of each sparse upsampling convolution in the hierarchy. See the keras documentation on initializers for more details.
- –
upsampling_regularizer List with the regularizer for the weights of each sparse upsampling convolution in the hierarchy. See the keras documentation on regularizers for more details.
- –
upsampling_constraint List with the constraints for the weights of each sparse upsampling convolution in the hierarchy. See the keras documentation on constraints for more details.
- –
upsampling_bn_momentum List with the momentum for the moving average of the batch normalization for each sparse upsampling convolution. Note that the normalization is currently carried out independently for each element in the batch.
- –
upsampling_shared_mlp_initializer List with the initializer for the SharedMLP of each upsampling block in the hierarchy. See the keras documentation on initializers for more details.
- –
upsampling_shared_mlp_regularizer List with the regularizer for the SharedMLP of each upsampling block in the hierarchy. See the keras documentation on regularizers for more details.
- –
upsampling_shared_mlp_constraint List with the constraints for the SharedMLP of each upsampling block in the hierarchy. See the keras documentation on constraints for more details.
- –
upsampling_shared_mlp_activation List with the activation function for the SharedMLP of each upsampling block in the hierarchy. See the keras documentation on activations for more details.
- –
upsampling_shared_mlp_bn_momentum List with the momentum for the moving average of the batch normalization for the SharedMLP of each upsampling block. Note that the normalization is currently carried out independently for each element in the batch.
- –
feature_dim_divisor The divisor for the dimensionality of the feature space governing how the wrappers transform the dimensionality before the convolutions. Typically the feature dim divisor reduces the dimensionality (often to its half value) at the pre-wrapper before the convolutions and then it is restored by post-wrapper after the convolutions.
- –
dim_transform_kernel_initializer The initializer for the wrapper dimensionality transformation. See the keras documentation on initializers for more details.
- –
dim_transform_kernel_regularizer The regularizer for the wrapper dimensionality transformation. See the keras documentation on regularizers for more details.
- –
dim_transform_kernel_constraint The constraints for the wrapper dimensionality transformation. See the keras documentation on constraints for more details.
- –
dim_transform_activation The activation function for the wrapper dimensionality transformation. See the keras documentation on activations for more details.
- –
dim_transform_bn_momentum The momentum for the moving average of the batch normalization for the wrapper dimensionality transformation. Note that the normalization is currently carried out independently for each element in the batch.
- –
residual_strategy The type of layer to be used in the residual blocks at each level of the hierarchy. It can be either
"sharedmlp"to use a Shared MLP in the residual blocks or"ssc3d"to use a submanifold sparse convolution.- –
post_residual_shared_mlp Whether to apply a SharedMLP after the residual block (
true) or not (false).- –
residual_shared_mlp_kernel_initializer The initializer for the residual SharedMLP. See the keras documentation on initializers for more details.
- –
residual_shared_mlp_kernel_regularizer The regularizer for the residual SharedMLP. See the keras documentation on regularizers for more details.
- –
residual_shared_mlp_kernel_constraint The constraints for the residual SharedMLP. See the keras documentation on constraints for more details.
- –
residual_shared_mlp_activation The activation function for the residual SharedMLP. See the keras documentation on activations for more details.
- –
model_handling The model handling specification is the same as the PointNet model handling specification but a
"DLSparseShadowSequencer"MUST be used. SeeDLSparseShadowSequencerand the sparse shadow sequencer documentation for further details.- –
compilation_args - –
architecture_graph_path - –
architecture_graph_args
- –
- –
training_evaluation_metrics - –
training_class_evaluation_metrics - –
training_evaluation_report_path - –
training_class_evaluation_report_path - –
training_confusion_matrix_report_path - –
training_confusion_matrix_report_plot - –
training_class_distribution_report_path - –
training_classified_point_cloud_path - –
training_activations_path
Receptive fields
The receptive fields can be as important as the model’s architecture. They define the input to the neural network. If a receptive field is poorly configured it can be impossible for the neural network to converge to a satisfactory solution. Thus, understanding receptive fields is key to successfully configure a neural network for point cloud processing. The sections below explain how to use the available receptive field definitions in the VL3D framework.
Grid
Grid subsampling is one of the simpler receptive fields. It consists of
dividing the input neighborhood into a fixed number of cells. Receptive fields
based on grid subsampling are implemented through
GridSubsamplingPreProcessor and
ReceptiveFieldGS. They can be configured as shown in the JSON below:
"pre_processing": {
"pre_processor": "grid_subsampling",
"sphere_radius": 0.2,
"separation_factor": 0.86,
"cell_size": [0.1, 0.1, 0.1],
"interpolate": false,
"nthreads": 6,
"receptive_fields_dir": "out/PointnetPwiseClassifier_GSfill_weighted/eval/receptive_fields/"
}
In the JSON above a grid-based receptive field is configured. The input
neighborhood will be a sphere of \(20\,\mathrm{cm}\). There will be
more spheres than needed to cover the entire input point cloud to achieve
significant overlapping between neighborhoods. In this case, this is achieved
using a separation factor of \(0.86\), i.e., the spheres will be seperated
in \(0.86\) times the radius (where \(2/\sqrt{3}\) is the max separation
factor that guarantees there are no gaps between neighborhoods). The built grid
will be the smaller one containing the sphere. Each cell of the grid will have
edges with length \(10\%\) of the radius. In case of missing centroids in
the grid, the corresponding cells will not be interpolated. Instead, the
coordinate-wise mean value will be considered for each empty cell to have a
fixed-size input. The generated receptive fields will be exported to the
directory given at receptive_fields_dir.
Furthest point sampling
Furthest point sampling (FPS) starts by considering an initial point. Then, the
second point will be the one that is furthest from the first. The third point
will be the one that is furthest from the first and the second, and so on
until the last point is selected. A receptive field based on FPS provides a
good coverage of the space occupied by points. The FPS receptive fields are
implemented through FurthestPointSubsamplingPreProcessor and
ReceptiveFieldFPS. They can be configured as shown in the JSON
below:
"pre_processing": {
"pre_processor": "furthest_point_subsampling",
"to_unit_sphere": false,
"support_strategy": "grid",
"support_chunk_size": 2000,
"support_strategy_fast": false,
"training_class_distribution": [10000, 10000],
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5,
"report_dir": "rf_oversampling/"
},
"center_on_pcloud": true,
"num_points": 8192,
"num_encoding_neighbors": 1,
"fast": false,
"neighborhood": {
"type": "rectangular3D",
"radius": 1.5,
"separation_factor": 0.5
},
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": "training_eval/training_receptive_fields/",
"receptive_fields_distribution_report_path": "training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "training_eval/receptive_fields_distribution.svg",
"receptive_fields_dir": "training_eval/receptive_fields/",
"training_support_points_report_path": "training_eval/training_support_points.las",
"support_points_report_path": "training_eval/support_points.las"
}
The JSON above defines a FPS receptive field on 3D rectangular neighborhoods with edges of length \(3\,\mathrm{m}\). Each receptive field will contain 8192 different points and it will be centered on a point from the input point cloud.
Arguments
- –
to_unit_sphere Whether to transform the structure space (spatial coordinates) of each receptive field (True) to the unit sphere (i.e., the distance between the center point and its furthest neighbor must be one) or not (False).
- –
support_chunk_size When given and distinct than zero, it will define the chunk size. The chunk size will be used to group certain tasks into chunks with a max size to prevent memory exhaustion.
- –
support_strategy Either
"grid"to find the support points as the closest neighbors to the nodes of a grid, or"fps"to select the support points through furthest point subsampling. The grid covers the space inside the minimum axis-aligned bounding box representing the point cloud’s boundary.- –
support_strategy_num_points When using the
"fps"support strategy, this parameter governs the number of furthest points that must be considered.
- –
support_strategy_fast When using the
"fps"support strategy, setting this parameter to true will use a significantly faster random sampling-based approximation of the furthest point subsampling strategy. Note that this approximation is only reliable for high enough values of"support_strategy_num_points"(at least thousands). Alternatively, it can be set to2to use an even faster approximation. However, this faster approach will be slower than the first one when the selected number of points is proportionally too small compared to the total number of points, e.g., when selecting 10,000 points from 80 millions. If3is given, then a simple uniform downsampling is computed instead of FPS or an stochastic approximation (this can be useful when it is known that the order of the point-wise indices do not present any spatial bias, e.g., if they have been randomly shuffled before). When using4the exhaustive FPS will be computed in parallel. The parallel approach is especially useful when the number of samples and the number of points are both too big (e.g., when taking \(10^5\) samples from \(10^8\) points) and a stochastic approximation is not reliable enough (e.g., due to biases in the geometric distribution of the points). Note that fast strategies greater than or equal to \(3\) only work when using the C++ version of the receptive field.
- –
receptive_field_oversampling When using strategies like furthest point sampling, this parameter can be used to define an oversampling method so neighborhood with not enough points are oversampled instead of discarded.
- –
min_points The minimum number of points that a receptive field must have to compute the oversampling. Note that receptive fields that do not have at least the minimum number of points will be discarded instead of oversampled.
- –
strategy The name of the oversampling strategiy to be computed. It can be either
"nearest","knn","spherical","gaussian_knn", or"spherical_radiation". SeeReceptiveFieldFPS.oversample()for more details.- –
k The k parameter for knn-like oversampling strategies.
- –
radius The radius parameter for spherical oversampling strategies.
- –
report_dir The path to the directory where the oversampled receptive fields will be exported. The oversample mask will be included in the output point cloud, so synthetic points can be differentiated from real ones.
- –
- –
training_class_distribution When given, the support points to be considered as the centers of the neighborhoods will be taken by randomly selecting as many points per class as specified. This list must have as many elements as classes. Then, each element can be understood as the number of samples centered on a point of the class that must be considered.
- –
shuffle_training_class_distribution Boolean flag to control whether to shuffle the point following the given
training_class_distribution(true, by default) or not (false). Note that setting this flag totrueis recommended to avoid biases during training.- –
center_on_pcloud When
truethe neighborhoods will be centered on a point from the input point cloud. Typically by finding the nearest neighbor of a support point in the input point cloud.- –
num_points How many points must be in the receptive field.
- –
num_encoding_neighbors How many neighbors must be considered when encoding the values for a point in the receptive field. If one, then the values of the point will be preserved, otherwise they will be interpolated from its k nearest neighbors.
- –
fast When
truethe FPS computation will be accelerated using a uniform point sampling strategy. It is recommended only when the number of points is too high to be computed deterministically. Alternatively, it is possible to use2for an even faster approach. However, this faster approach will be slower than the first one when the selected number of points is proportionally too small compared to the total number of points, e.g., when selecting 10,000 points from 80 millions. Besides, the C++ implementation supports3for a simple uniform downsampling (this can be useful when it is known that the order of the point-wise indices do not present any spatial bias, e.g., if they haven been randomly shufled before). When using4the exhaustive FPS will be computed in parallel. The parallel approach is especially useful when the number of samples and the number of points are both too big (e.g., when taking \(10^5\) samples from \(10^8\) points) and a stochastic approximation is not reliable enough (e.g., due to biases in the geometric distribution of the points).
- –
neighborhood Define the neighborhood to be used.
- –
type The type of neighborhood. Supported types are:
- –
"sphere" Consider a spherical neighborhood where the radius is the radius of the sphere.
- –
"cylinder" Consider a cylindrical neighborhood where the radius is the radius of the cylinder’s disk.
- –
"rectangular3d" Consider a rectangular 3D neighorbhood where the radius is half of the cell size. Alternatively, the radius can be given as a list of three decimal numbers. In this case, each number will define a different radius for each axis understood as \((x, y, z)\).
- –
"rectangular2d" Consider a rectangular 2D neighborhood where the radius is defined for the horizontal plane on \((x, y)\) while the \(z\) coordinate is considered unbounded.
- –
- –
radius A decimal number governing the size of the neighborhood. Note that a neighborhood of radius zero means to consider the entire point cloud as input.
- –
separation_factor A decimal number governing the separation between neighborhoods. Typically, it can be read as “how many times the radius” must be considered as the separation between neighborhoods.
- –
- –
nthreads How many threads must be used to compute the receptive fields. If -1 is given, then as many parallel threads as possible will be used. Note that in most Python backends processes will be used instead of threads due to the GIL issue.
- –
training_receptive_fields_distribution_report_path Path where a text report about the distribution of classes among the receptive fields will be exported. It considers the receptive fields used during training.
- –
training_receptive_fields_distribution_plot_path Path where a plot about the distribution of classes among the receptive fields will be exported. It considers the receptive fields used during training.
- –
training_receptive_fields_dir Path to the directory where the point clouds representing each receptive field will be written. It considers the receptive fields used during training.
- –
receptive_fields_distribution_report_path Path where a text report about the distribution of classes among the receptive fields will be exported.
- –
receptive_fields_distribution_plot_path Path where a plot about the distribution of classes among the receptive fields will be exported.
- –
receptive_fields_dir Path to the directory where the point clouds representing each receptive field will be written.
- –
training_support_points_report_path Path to the directory where the point cloud representing the training support points (those used as the centers of the input neighborhoods) will be exported.
- –
support_points_report_path Path to the directory where the point cloud representing the support points (those used as the centers of the input neighborhoods) will be exported.
Furthest point sampling++
There is a C++ version of FurthestPointSubsamplingPreProcessor and
ReceptiveFieldFPS implemented through the
FurthestPointSubsamplingPreProcessorPP and
ReceptiveFieldFPSPP classes. The JSON specification matches that of
furthest point sampling but without the
"support_chunk_size" argument. The JSON specification of the pre-processor
must be "pre_processor" : "furthest_point_subsamplingpp, as shown in the
example below:
"pre_processing": {
"pre_processor": "furthest_point_subsamplingpp",
"to_unit_sphere": false,
"support_strategy": "grid",
"support_strategy_fast": false,
"min_distance": 0,
"training_class_distribution": [10000, 10000],
"receptive_field_oversampling": {
"min_points": 24,
"strategy": "knn",
"k": 8,
"radius": 0.5,
"report_dir": null
},
"center_on_pcloud": true,
"num_points": 8192,
"num_encoding_neighbors": 1,
"fast": false,
"neighborhood": {
"type": "rectangular3D",
"radius": 1.5,
"separation_factor": 0.5
},
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
}
Arguments
See the arguments of furthest point sampling.
On top of this arguments, the following ones are supported:
- –
min_distance The support points and also each neighborhood will be computed on decimated representations such that any pair of points is never closer than the given minimum distance threshold. If zero is given, then nothing happens. If a values greater than zero is given, then the computation should be faster due to the minimum distance-based decimation.
Hierarchical furthest point sampling
Hierarchical furthest point sampling applies FPS many consecutive times up to a
max depth. More details about FPS can be read in the
furthest point sampling receptive field documentation.
The hierarchical FPS is implemented through
HierarchicalFPSPreProcessor and
ReceptiveFieldHierarchicalFPS. They can be configured as shown in the
JSON below:
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 60000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 2000,
"support_strategy_fast": true,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5,
"report_dir": "*/rf_oversampling/"
},
"center_on_pcloud": true,
"neighborhood": {
"type": "sphere",
"radius": 3.0,
"separation_factor": 0.8
},
"num_points_per_depth": [512, 256, 128, 64, 32],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 8, 8, 4],
"num_pwise_neighbors": [32, 16, 16, 8, 4],
"num_upsampling_neighbors": [1, 16, 8, 8, 4],
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"receptive_fields_dir": null,
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
}
The JSON above defines a hierarchical FPS receptive field on 3D spherical neighborhoods with radius \(3\,\mathrm{m}\). It has depth five with 512 points in the first neighborhood and 32 in the last and it is centered on points from the input point cloud.
Arguments
- –
support_strategy_num_points When using the
"fps"support strategy, this parameter governs the number of furthest points that must be considered.- –
to_unit_sphere Whether to transform the structure space (spatial coordinates) of each receptive field (True) to the unit sphere (i.e., the distance between the center point and its furthest neighbor must be one) or not (False).
- –
support_strategy Either
"grid"to find the support points as the closest neighbors to the nodes of a grid, or"fps"to select the support points through furthest point subsampling. The grid covers the space inside the minimum axis-aligned bounding box representing the point cloud’s boundary.- –
support_chunk_size When given and distinct than zero, it will define the chunk size. The chunk size will be used to group certain tasks into chunks with a max size to prevent memory exhaustion.
- –
support_strategy_fast When using the
"fps"support strategy, setting this parameter to true will use a significantly faster random sampling-based approximation of the furthest point subsampling strategy. Note that this approximation is only reliable for high enough values of"support_strategy_num_points"(at least thousands). Alternatively, it can be set to2to use an even faster approximation. However, this faster approach will be slower than the first one when the selected number of points is proportionally too small compared to the total number of points, e.g., when selecting 10,000 points from 80 millions. If3is given, then a simple uniform downsampling is computed instead of FPS or an stochastic approximation (this can be useful when it is known that the order of the point-wise indices do not present any spatial bias, e.g., if they have been randomly shuffled before). When using4the exhaustive FPS will be computed in parallel. The parallel approach is especially useful when the number of samples and the number of points are both too big (e.g., when taking \(10^5\) samples from \(10^8\) points) and a stochastic approximation is not reliable enough (e.g., due to biases in the geometric distribution of the points). Note that fast strategies greater than or equal to \(3\) only work when using the C++ version of the receptive field.- –
center_on_pcloud When
truethe neighborhoods will be centered on a point from the input point cloud. Typically by finding the nearest neighbor of a support point in the input point cloud.
- –
neighborhood Define the neighborhood to be used. For further details on neighborhood definition, see the FPS neighborhood specification.
- –
receptive_field_oversampling Define the oversampling strategy for the receptive fields, if any. For further details on neighborhood definition, see the FPS receptive field oversampling specification.
- –
num_points_per_depth The number of points defining the receptive field at each depth level.
- –
fast_flag_per_depth Whether to use a faster random sampling-based approximation for the FPS at each depth level. Alternatively, it is possible to use
2for an even faster approach. However, this faster approach will be slower than the first one when the selected number of points is proportionally too small compared to the total number of points, e.g., when selecting 10,000 points from 80 millions. Besides, the C++ implementation supports3for a simple uniform downsampling (this can be useful when it is known that the order of the point-wise indices do not present any spatial bias, e.g., if they haven been randomly shufled before). When using4the exhaustive FPS will be computed in parallel. The parallel approach is especially useful when the number of samples and the number of points are both too big (e.g., when taking \(10^5\) samples from \(10^8\) points) and a stochastic approximation is not reliable enough (e.g., due to biases in the geometric distribution of the points).- –
num_downsampling_neighbors How many closest neighbors consider for the downsampling neighborhoods at each depth level.
- –
num_pwise_neighbors How many closest neighbors consider in the downsampled space that will be the input of a feature extraction operator, for each depth level.
- –
num_upsampling_neighbors How many closest neighbors consider for the upsampling neighborhoods at each depth level.
- –
nthreads How many threads must be used to compute the receptive fields. If -1 is given, then as many parallel threads as possible will be used. Note that in most Python backends processes will be used instead of threads due to the GIL issue.
- –
training_receptive_fields_distribution_report_path Path where a text report about the distribution of classes among the receptive fields will be exported. It considers the receptive fields used during training.
- –
training_receptive_fields_distribution_plot_path Path where a plot about the distribution of classes among the receptive fields will be exported. It considers the receptive fields used during training.
- –
training_receptive_fields_dir Path to the directory where the point clouds representing each receptive field will be written. It considers the receptive fields used during training.
- –
receptive_fields_distribution_report_path Path where a text report about the distribution of classes among the receptive fields will be exported.
- –
receptive_fields_distribution_plot_path Path where a plot about the distribution of classes among the receptive fields will be exported.
- –
receptive_fields_dir Path to the directory where the point clouds representing each receptive field will be written.
- –
training_support_points_report_path Path to the directory where the point cloud representing the training support points (those used as the centers of the input neighborhoods) will be exported.
- –
support_points_report_path Path to the directory where the point cloud representing the support points (those used as the centers of the input neighborhoods) will be exported.
Hierarchical furthest point sampling++
There is a C++ version of HierarchicalFPSPreProcessor and
ReceptiveFieldHierarchicalFPS implemented through the
HierarchicalFPSPreProcessorPP and
ReceptiveFieldHierarchicalFPSPP classes. The JSON specification
matches that of
hierarchical furthest point sampling
but without the "support_chunk_size" argument. The JSON specification of the
pre-processor must be "pre_processor" : "hierarchical_fpspp", as shown in
the example below:
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 60000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": true,
"min_distance": 0,
"receptive_field_oversampling": {
"min_points": 24,
"strategy": "knn",
"k": 8,
"radius": 0.5,
"report_dir": null
},
"center_on_pcloud": true,
"neighborhood": {
"type": "sphere",
"radius": 3.0,
"separation_factor": 0.8
},
"num_points_per_depth": [512, 256, 128, 64, 32],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 8, 8, 4],
"num_pwise_neighbors": [32, 16, 16, 8, 4],
"num_upsampling_neighbors": [1, 16, 8, 8, 4],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
}
Arguments
See the arguments of hierarchical furthest point sampling.
- –
min_distance The support points and also each neighborhood will be computed on decimated representations such that any pair of points is never closer than the given minimum distance threshold. If zero is given, then nothing happens. If a values greater than zero is given, then the computation should be faster due to the minimum distance-based decimation.
Hierarchical sparse grid
Hierarchical sparse grid computes a hierarchical of sparse grids with lower
resolution at each successive depth level. It is implemented through
HierarchicalSGPreProcessor and
ReceptiveFieldHierarchicalSG. They can be configured as shown in the
JSON below:
{
"pre_processor": "hierarchical_sg",
"support_strategy_num_points": 4096,
"support_strategy": "fps",
"support_strategy_fast": 4,
"center_on_pcloud": true,
"training_class_distribution": [500, 500, 500, 500, 500, 500, 500, 500, 500, 500, 500],
"neighborhood": {
"type": "sphere",
"radius": 16.0,
"separation_factor": 0.8
},
"cell_size": 0.25,
"submanifold_window": [2, 1, 1, 1],
"downsampling_window": [2, 2, 2],
"downsampling_stride": [2, 2, 2],
"upsampling_window": [2, 2, 2],
"upsampling_stride": [2, 2, 2],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": null
}
The JSON above defines a hierarchical SG receptive field on 3D spherical neighborhoods with radius \(16\,mathrm{m}\). It has depth four with an initial cell size of \(25\,\mathrm{cm}\).
Arguments
- –
support_strategy_num_points - –
support_strategy - –
support_strategy_fast - –
center_on_pcloud When
truethe neighborhoods will be centered on a point from the input point cloud. Typically by finding the nearest neighbor of a support point in the input point cloud.- –
neighborhood - –
cell_size The cell size for the first sparse voxelization in the hierarchy, i.e., the one with the highest resolution.
- –
submanifold_window The number of cells for one half of the window for submanifold convolutions. Note that this window must always have an odd number of cells. Therefore, the number of cells of the submanifold convolutional window is given by \(2 \times ` ``submanifold_window`\) \(+ 1\). Note also that there is no stride specification for submanifold convolutional windows because it must be always one. Each value in the list corresponds to a depth in the hierarchy.
- –
downsampling_window The number of cells in the entire window for downsampling convolutions. Each value in the list corresponds to a transformation between depths in the hierarchy (i.e., the list must have as many elements as depth minus one). The downsampling convolutions transform high resolution levels to low resolution levels.
- –
downsampling_stride The stride for the movement of the downsampling convolutional window.
- –
upsampling_window The number of cells in the entire window for upsampling convolutions. Each value in the list corresponds to a transformation between depths in the hierarchy (i.e., the list must have as many elements as depth minus one). The upsampling convolutions transform low resolution levels to high resolution levels.
- –
upsampling_stride The stride or the movement of the upsampling convolutional window.
- –
nthreads How many threads must be used to compute the receptive fields. If -1 is given, then as many parallel threads as possible will be used.
- –
training_receptive_fields_distribution_report_path - –
training_receptive_fields_distribution_plot_path - –
training_receptive_fields_dir - –
receptive_fields_distribution_report_path - –
receptive_fields_distribution_plot_path - –
receptive_fields_dir - –
training_support_points_report_path - –
support_points_report_path
Optimizers
The optimizers, as well as the loss functions, can be configured through the
compilation_args JSON specification. More concretely, the optimizers can
be configured through the optimizer element of a compilation_args. See
the JSON below as an example:
"optimizer": {
"algorithm": "SGD",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2000,
"decay_rate": 0.96,
"staircase": false
}
}
}
The supported optimization algorithms are those from Keras (see
Keras documentation on optimizers).
The learning_rate can be given both as an initial value or as an
scheduling. You can see the
Keras learning rate schedules API
for more information. Below the list of supported optimizers (its name must be
specified for the "algorithm" attribute):
- – SGD
See the Keras documentation about the stochastic gradient descent optimizer .
- – RMSprop
See the Keras documentation about the RMSprop with plain momentum optimizer .
- – Adam
- – AdamW
See the Keras documentation about the Adam with decay weights optimizer .
- – Adadelta
- – Adagrad
- – Adamax
See the Keras documentation about the ADAM optimizer with infinity norm optimizer .
- – Nadam
See the Keras documentation about the ADAM with Nesterov momentum optimizer .
- – Ftrl
See the Keras documentation about the Follow the Regularized Leader (FTRL) optimizer .
- – Lion
- – Lamb
- – CentralizedSGD
Centralized version of the SGD optimizer (see
CentralizedSGD).- – CentralizedRMSprop
Centralized version of the RMSprop optimizer (see
CentralizedRMSProp).- – CentralizedAdam
Centralized version of the Adam optimizer (see
CentralizedAdam).- – CentralizedAdamW
Centralized version of the AdamW optimizer (see
CentralizedAdamW).- – CentralizedAdadelta
Centralized version of the Adadelta optimizer (see
CentralizedAdadelta).- – CentralizedAdagrad
Centralized version of the Adagrad optimizer (see
CentralizedAdagrad).- – CentralizedAdamax
Centralized version of the Adamax optimizer (see
CentralizedAdamax).- – CentralizedNadam
Centralized version of the Nadam optimizer (see
CentralizedNadam).- – CentralizedFtrl
Centralized version of the FTRL optimizer (see
CentralizedFTRL).- – CentralizedLion
Centralized version of the Lion optimizer (see
CentralizedLion).- – CentralizedLamb
Centralized version of the Lamb optimizer (see
CentralizedLamb).
Losses
The loss functions, as well as the optimizers, can be configured through the
compilation_args JSON specification. More concretely, the loss functions
can be configured through the loss element of a compilation_args. See
the JSON below as an example:
"loss": {
"function": "class_weighted_categorical_crossentropy"
}
The supported loss functions are those from Keras (see Keras documentation on losses). On top of that, the VL3D framework provides some custom loss functions.
- –
"class_weighted_binary_crossentropy" A binary loss that supports class weights. It can be useful to mitigate class imbalance in binary point-wise classification tasks.
- –
"class_weighted_categorical_crossentropy" A loss that supports class weights for more than two classes. It can be useful to mitigate class imbalance in multiclass point-wise classification tasks.
- –
"ragged_binary_crossentropy" A binary crossentropy loss that can deal with irregular data, e.g., sparse voxelizations where each element has a different number of active cells (i.e., voxels with at least one point).
- –
"ragged_categorical_crossentropy" A categorical cross entropy loss that can deal with irregulardata, e.g., sparse voxelizations where each element has a different number of active cells (i.e., voxels with at least one point).
- –
"ragged_class_weighted_binary_crossentropy" Class weighted version of the ragged binary cross entropy. It can be useful to mitigate class imbalance in binary point-wise classification tasks.
- –
"ragged_class_weighted_categorical_crossentropy" Class weighted version of the ragged categorical cross entropy. It can be useful to mitigate class imbalance in multiclass point-wise classification tasks.
Sequencers and data augmentation
Deep learning models can handle the input data using a sequencer like the
DLSequencer. Sequencers govern how the batches are fed into the
neural network, especially during training time. Data augmentation components
like the SimpleDataAugmentor can be used through sequencers.
Sequencers can be defined for any deep learning model by adding a
"training_sequencer" dictionary inside the "model_handling"
specification.
Deep learning sequencer
One of the most simple sequencers is the deep learning sequencer
(DLSequencer). It can be used simply to load the data in the GPU
batch by batch instead of considering all the data at the same time. Morever,
it can be used to randomly swap the order of all the elements (along the
different batches) at the end of each training epoch. A
SimpleDataAugmentor can be configured through the "augmentor"
element. The JSON below shows an example of how to configure a KPConv-like
model with a DLSequencer:
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.99,
"end": 1.01
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.001
}
}
]
}
}
In the JSON above a DLSequencer is configured to randomly reorder the
input data at the end of each epoch and to provide data augmentation.
More concretely, the data augmentation will start by rotating all the points
with an angle taken from a uniform distribution inside the interval
\([-\pi, \pi]\), then it will apply a random scale factor taken from
another uniform distribution inside the interval \([0.99, 1.01]\), and
finally some jitter where the displacement for each coordinate will follow a
normal distribution with mean \(\mu=0\) and standard deviation
\(\sigma=0.001\).
Arguments
- –
type The type of sequencer to be used. It must be
"DLSequencer"to use aDLSequencer.- –
random_shuffle_indices Whether to randomly shuffle the indices of the elements along the many batches (
true) or not (false).- –
augmentor The data augmentation specification. For
DLSequenceronly theSimpleDataAugmentoris supported, so it can be directly specified as a dictionary with one element"transformations"that consists of a list of"Rotation","Scale", and"Jitter"transformations, each following either a uniform or a normal distribution.
Sparse shadow sequencer
Models that work with sparse voxelizations need a sparse shadow sequencer
(DLSparseShadowSequencer) to deal with sparse data. This sequencer
handles irregular tensors with padding so they can be feed into the neural
network. It also tracks the indices at which the different tensors must be
considered when only active voxels must be used (e.g., for sparse convolutions).
The JSON below shows an example of how to configure a sparse convolutional model
with a DLSparseShadowSequencer:
"training_sequencer": {
"type": "DLSparseShadowSequencer",
"random_shuffle_indices": true
}
In the JSON above a DLSparseShadowSequencer is defined to feed the
data into the neural network. It will compute a random shuffle of the batches
at the end of each epoch.
Arguments
- –
type The type of sequencer to be used. It must be
"DLSparseShadowSequencer"to use aDLSparseShadowSequencer.- –
random_shuffle_indices Whether to randomly shuffle the indices of the elements along the many batches (
true) or not (false).
Offline sequencer
The offline sequencer works as a decorator that can wrap other sequencers and use them in an offline way. Any decorated sequencer will write the data to a file in HDF5 format instead of feeding it directly to the neural network. Then, the data will be streamed from the file to the deep learning model during training. The main benefit of an offline sequencer is that we can train a model with more data that we can hold in memory. Besides, the file can be used to store pre-processed training data so it is not necessary to generate it for each training process but just once.
Offline sequencers are implemented through the DLOfflineSequencer
class. It is recommended to disable any random procedure in the decorated
sequencer (backbone). The DLOfflineSequencer supports its own
randomization at both chunk and batch level. To understand this, let us say
that a neighborhood is an element, elements are grouped in batches, and
batches are grouped in chunks. Randomizing the chunks means that they
will be iterated in a different way at each pass of the sequencer.
Randomizing the batches means that they will be iterated in a different order
for each pass. The figure below illustrates the different ways to iterate over
offline sequences.
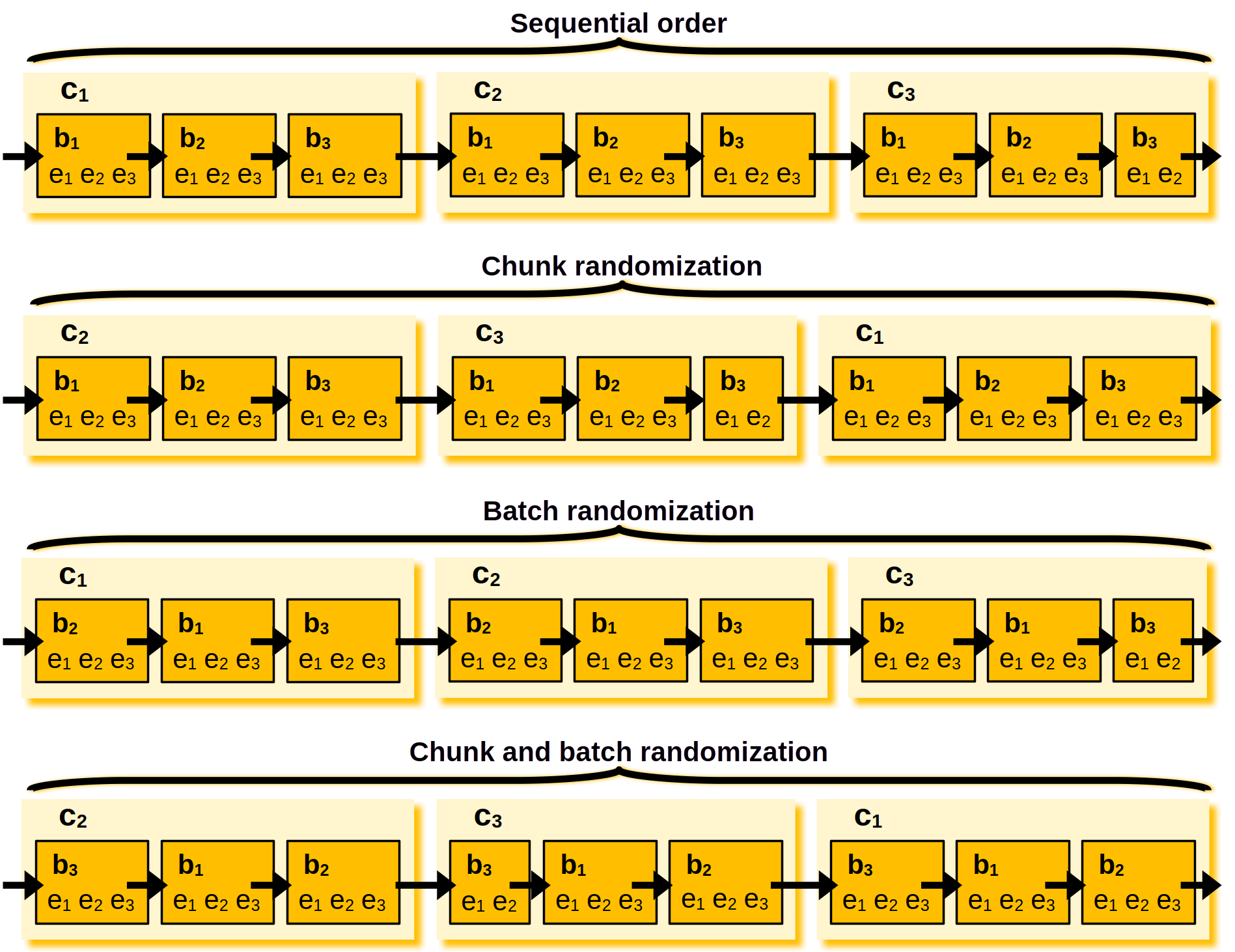
Visualization of the randomization strategies that can be used with the offline sequencer. The \(c_i\) is read as the i-th chunk, \(b_j\) as the j-th batch, and \(e_k\) as the k-th element. The sequencing starts on the left side and moves towards the right side.
The JSON below shows an example of how to configure a
DLOfflineSequencer wrapping a DLSequencer (see
deep learning sequencer documentation).
"training_sequencer": {
"type": "DLOfflineSequencer",
"offline_storage": "/tmp/training_dataset.os1",
"chunk_size": 250,
"chunk_randomization": false,
"batch_randomization": false,
"disable_offline_storage_writing": false,
"offline_pcloud": [
"/data/point_clouds/pcloud2.laz",
"/data/point_clouds/pcloud3.laz"
],
"backbone": {
"type": "DLSequencer",
"random_shuffle_indices": false,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.99,
"end": 1.01
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.001
}
}
]
}
}
}
The JSON above specifies an offline sequencer that considers the point cloud in the current pipeline but also two other point clouds to generate an offline data storage. It uses a chunk size of 250 batches with no randomization at all.
Arguments
- –
type The type of sequencer to be used. It must be
"DLOfflineSequencer"to use aDLOfflineSequencer.- –
offline_storage The path to the file where the offline storage will be written (and read).
- –
chunk_size How many batches per chunk.
- –
chunk_randomization Whether to randomize the order in which the chunks are iterated (
true) or not (false).- –
batch_randomization Whether to randomize the order in which the batches are iterated (
true) or not (false).- –
disable_offline_storage_writing Whether to allow writing to the storage file (
false) or not (true). Disable writing can be especially useful to load a previously written offline storage without extending it with further data.- –
offline_pcloud A list with paths to extra point clouds to be pre-processed and included into the offline storage. Note that only the deep learning pre-processor will be applied, i.e., previous components of the pipeline that have updated the input point cloud will not be applied to these point clouds. Therefore, it is strongly recommended to use offline sequencers only with pipelines that do not apply any other pre-processing to the point clouds besides the one defined for the neural network.
- –
backbone The specification of the decorated sequencer. For example, it can be a deep learning sequencer.
Training paradigms
Continual learning
Once a model has been trained, it might be the case that we want to train it
using a different dataset. Using more training data on a model is likely to
improve its generalization capabilities. In the VL3D framework, further
training of a pretrained model is quite simple. Using the pretrained_model
element inside a training component to specify the path to a pretrained
model is enough, as shown in the JSON below:
{
"train": "PointNetPwiseClassifier",
"pretrained_model": "out/my_model/pipe/MyModel.model"
}
The JSON above loads a pretrained PointNetPwiseClassif model for
further training. Note that model parameters are available. For example,
it is possible to change the optimization of the model through the
compilation_args element. This can be used to start the training
at a lower learning rate than the original model to avoid losing what
has been learned before, as typical in fine-tuning. Alternatively, the
pretrained_nn_path element can be set to specify the path to the
.keras file corresponding to the model. This specification is useful when
the path to the files has changed and they cannot be found without the explicit
paths.
Transfer learning
Transfer learning is often carried out by transferring the weights of a source
model \(A\) to a target model \(B\). The "transfer_weights"
list can be defined inside the "model_handling" specification of a deep
learning model to govern what weights of \(A\) are transferred to what
layers of \(B\). The transferring domain is the entire layer, i.e., the
weights from a layer \(A_l\) are transferred to the weights of a layer
\(B_l\) that must be compatible in terms of number of tensors representing
weights and the dimensionality of the tensors. See DLTransferHandler
for further details.
The JSON below shows how a "transfer_weights" list can be defined inside a
"model_handling" specification:
"transfer_weights": [
{
"model_weights": "/oldext4/lidar_data/vl3dhack/multiclass/out/DL_SFLNETPP/T5/model/SFLNET.keras",
"layer_translator": {
"PreHG_d4_5": null,
"LightKPConv_d4_5": null,
"LightKPConv_d4_5_BN": null,
"LightKPConv_d4_5_ReLU": null,
"PostHG_d4_5": null,
"ParHG_d4_5": null,
"PostHG_d4_5_BN": null,
"PostHG_d4_5_ACT": null,
"PreHG_d5_6": null,
"LightKPConv_d5_6": null,
"LightKPConv_d5_6_BN": null,
"LightKPConv_d5_6_ReLU": null,
"PostHG_d5_6": null,
"ParHG_d5_6": null,
"PostHG_d5_6_BN": null,
"PostHG_d5_6_ACT": null
},
"default_to_null": false
}
]
The JSON above defines a transfer between two SFL-Net models. The target model will accept most weights from the source model. Only the weights of feature extraction layers in the encoding hierarchy at depth five and four will be initialized from scratch.
Arguments
- –
transfer_weights A list specifying the many transfer operations that must be carried out. Note that the transferrings will occur in the same order they are given. Thus, if a layer is transferred more than once, only the last time will define the actual weights for the target model.
- –
model_weights A path to either a
.kerasfile containing a full keras model or a.weights.h5file containing only the weights of a keras model.- –
layer_translator Dictionary whose keys represent the original name of a layer in the target model and whose keys give the corresponding name in the domain of the source model. Note that when a
.kerasfile is given, the names of the layers correspond to those that appear in the model summary. However, when a.weights.h5file is given, the names of the layers are given by the snake-formatted class name for the first occurence of the layer. Further repetitions append_1,_2,_3and so on. The alternative name format for the.weights.h5is due to how keras automatically renames its layers for weights-only serialization. Users are strongly encouraged to use.kerasfiles for transfer learning as they are less prone to errors and future problems.- –
default_to_null Boolean flag governing whether to assume as null those target layers who do not appear on the translator. If the flag is set to
trueand there is no key in the translator matching the target layer name, then that layer will be initialized from scratch. If the flat is set tofalse(default), the name of the target layer will be assume to be same as the name of the source layer.
- –
Freezing layers
Sometimes it might be interesting to freeze some layers during training,
i.e., to avoid updating their weights (parameters) when training a neural
network. For example, hierarchical feature extraction architectures often
compute the most general features on the less deep levels of the hierarchy.
Thus, it makes sense to freeze these layers and retrain only the deepest levels
to tune the model on a new dataset. Moreover, freeze training can be especially
useful when combined with transfer learning. One typical practice is to transfer
the hierarchical feature extraction layers of a model and freeze them so they
are used as a backbone. One could add new layers on top of the backbone or
unfreeze only the final ones doing the classification itself. This way the
new model can exploit the features from a pretrained model but adapting to a
different task. See DLTrainingHandler for further details.
The JSON below shows how a "freeze_training" list can be defined inside a
"model_handling" specification:
"freeze_training": [
{
"layers": [
"PreHG_d1_1", "LightKPConv_d1_1", "LightKPConv_d1_1_BN", "LightKPConv_d1_1_ReLU", "PostHG_d1_1", "ParHG_d1_1", "PostHG_d1_1_BN", "PostHG_d1_1_ACT",
"PreHG_d1_2", "LightKPConv_d1_2", "LightKPConv_d1_2_BN", "LightKPConv_d1_2_ReLU", "PostHG_d1_2", "ParHG_d1_2", "PostHG_d1_2_BN", "PostHG_d1_2_ACT"
],
"initial_learning_rate": 1e-3,
"training_interval": [5, -1],
"strategy": null
},
]
The JSON above specified that the layers at the first depth of a hierarchical feature extractor must be frozen after the fifth iteration. At the same time, the learning rate will be restarted to \(10^{-3}\) and the layers will remain frozen until the end of training.
Arguments
- –
freeze_training A list specifying the many freeze operations that must be carried out.
- –
layers A list with the names of the layers to freeze. Alternatively, it can be the string
"all"to consider all the layers in sequential order or"all_reverse"to consider them in reverse sequential order.- –
initial_learning_rate The initial learning rate for the training process with the specified frozen layers. If
null, the learning rate will be the corresponding one continuing the previous training process, i.e., next iteration of the current scheduler.- –
training_interval The epoch interval during which the layers must remain frozen. It is given as a list of two values. The first one is the epoch at which the freeze starts. The last one is the epoch at which it ends. Note that for the end point it is possible to use
-1which means the layer will be unfrozen at the end of all training epochs.- –
strategy The strategy to be applied. It can be
null, which means no special strategy will be applied (the layers are frozen during the given interval).- –
type What type of strategy must be used. It can be
"round_robin"(a subset of the layers is frozen and this subset changes after a given number of epochs selecting consecutive layers cyclically) or"random"(a random subset of the layers is frozen and this subset changes after a given number of epochs).- –
iterative_span The number of epochs that the subset of layers selected by the strategy lasts until it is updated.
- –
window_size How many layers from the pool of layers (
layers) are considered for the subset of layers to be frozen by the specified strategy.
- –
- –
To understand how the round robin strategy works, assume a model with five layers \(A, B, C, D, E\). Let us say that we consider a round robin strategy with an iterative span of five and a window size of two. First, the layers \(A\) and \(B\) will be frozen for five epochs. Afterward, layers \(A\) and \(B\) will become unfrozen but layers \(C\) and \(D\) will be frozen. Then, layers \(C\) and \(D\) will be unfrozen but layer \(E\) will be frozen. Next, layer \(D\) will become unfrozen and layers \(A\) and \(B\) will be frozen again, and so on until the end of training.
Working examples
This section contains many simply working examples that provide a simple baseline configuration for some of the different models that can be designed with the VirtuaLearn3D++ framework.
PointNet-like model
This example shows how to define two different pipelines, one to train a model
and export it as a PredictivePipeline, the other to use the
predictive pipeline to compute a semantic segmentation on a previously unseen
point cloud. Readers are referred to the
pipelines documentation to read more
about how pipelines work and to see more examples.
Training pipeline
The training pipeline will train a PointNetPwiseClassif to classify
the points depending on whether they represent the ground, vegetation,
buildings, urban furniture, or vehicles. The training point cloud is generated
from the March 2018 training point cloud in the
Hessigheim dataset
by reducing
the original classes to the five categories mentioned before.
The receptive fields are computed following a furthest point subsampling strategy such that each receptive field has \(8192\) points. The receptive fields are built from rectangular neighborhoods with a half size (radius) of \(5\,\mathrm{m}\), i.e., voxels with edge length \(10\,\mathrm{m}\). Furthermore, a class weighting strategy is used to modify the loss function so it accounts for the class imbalance. In this case, the ground class has a weight of \(\frac{1}{4}\), the vegetation and building classes a weight of \(\frac{1}{2}\), and the urban furniture and vehicle classes a weight of one.
The learning rate on plateau strategy is configured with a highly enough patience so it will never trigger. However, as it is enabled, the learning rate will be traced by the training history and included in the plots. The optimizer is a stochastic gradient descent (SGD) initialized with a learning rate of \(10^{-2}\). The learning rate will be exponentially reduced with a decay rate of \(0.96\) each \(2000\) steps. Once the training has been finished, the model will be exported to a predictive pipeline that includes the class transformation so it can be directly applied later to the corresponding validation point cloud in the Hessigheim dataset.
The JSON below corresponds to the described training pipeline.
{
"in_pcloud": [
"/data/Hessigheim_Benchmark/Epoch_March2018/LiDAR/Mar18_train.laz"
],
"out_pcloud": [
"/data/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/Rect3D_alt_5m_T1/*"
],
"sequential_pipeline": [
{
"class_transformer": "ClassReducer",
"on_predictions": false,
"input_class_names": ["Low vegetation", "Impervious surface", "Vehicle", "Urban furniture", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "Vertical surface", "Chimney"],
"output_class_names": ["Ground", "Vegetation", "Building", "Urban furniture", "Vehicle"],
"class_groups": [["Low vegetation", "Impervious surface", "Soil/Gravel"], ["Shrub", "Tree"], ["Roof", "Facade", "Vertical surface", "Chimney"], ["Urban furniture"], ["Vehicle"]],
"report_path": "*class_reduction.log",
"plot_path": "*class_reduction.svg"
},
{
"train": "PointNetPwiseClassifier",
"fnames": ["AUTO"],
"training_type": "base",
"random_seed": null,
"model_args": {
"num_classes": 5,
"class_names": ["Ground", "Vegetation", "Building", "Urban furniture", "Vehicle"],
"num_pwise_feats": 20,
"pre_processing": {
"pre_processor": "furthest_point_subsampling",
"to_unit_sphere": false,
"support_strategy": "grid",
"support_chunk_size": 2000,
"support_strategy_fast": false,
"center_on_pcloud": true,
"num_points": 8192,
"num_encoding_neighbors": 1,
"fast": false,
"neighborhood": {
"type": "rectangular3D",
"radius": 5.0,
"separation_factor": 0.8
},
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": "*/training_eval/training_receptive_fields/",
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"receptive_fields_dir": "*/training_eval/receptive_fields/",
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"kernel_initializer": "he_normal",
"pretransf_feats_spec": [
{
"filters": 64,
"name": "prefeats64_A"
},
{
"filters": 64,
"name": "prefeats_64B"
},
{
"filters": 128,
"name": "prefeats_128"
},
{
"filters": 192,
"name": "prefeats_192"
}
],
"postransf_feats_spec": [
{
"filters": 128,
"name": "posfeats_128"
},
{
"filters": 192,
"name": "posfeats_192"
},
{
"filters": 256,
"name": "posfeats_end_64"
}
],
"tnet_pre_filters_spec": [64, 128, 192],
"tnet_post_filters_spec": [192, 128, 64],
"final_shared_mlps": [256, 192, 128],
"skip_link_features_X": false,
"include_pretransf_feats_X": false,
"include_transf_feats_X": true,
"include_postransf_feats_X": false,
"include_global_feats_X": true,
"skip_link_features_F": false,
"include_pretransf_feats_F": false,
"include_transf_feats_F": false,
"include_postransf_feats_F": false,
"include_global_feats_F": false,
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"features_structuring_representation_dir": "*/training_eval/feat_struct_layer/",
"class_weight": [0.25, 0.5, 0.5, 1, 1],
"training_epochs": 200,
"batch_size": 16,
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "SGD",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"training_activations_path": "*/training_eval/activations.las"
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*pipe/Rect3D_5m_T1.pipe",
"include_writer": false,
"include_imputer": false,
"include_feature_transformer": false,
"include_miner": false,
"include_class_transformer": true
}
]
}
The table below represents the distribution of reference and predicted labels on the training dataset. The class imbalance can be clearly observed. Nevertheless, thanks to the class weights, the model gives more importance to the less populated classes, so they have an appreciable impact on the weight updates during the gradient descent iterations.
CLASS |
PRED. COUNT |
PRED. PERCENT. |
TRUE COUNT |
TRUE PERCENT. |
|---|---|---|---|---|
Ground |
39676955 |
66.746 |
40385955 |
67.938 |
Vegetation |
9858128 |
16.584 |
9163959 |
15.416 |
Building |
8257266 |
13.891 |
8477955 |
14.262 |
Urban furniture |
1367284 |
2.300 |
1159205 |
1.950 |
Vehicle |
285473 |
0.480 |
258032 |
0.434 |
The figure below represents the receptive fields. The top rows represent the outputs of the softmax layer that describe from zero to one how likely a given point is to belong to the corresponding class. The bottom row represents the reference (classification) and predicted (predictions) labels inside the receptive field.
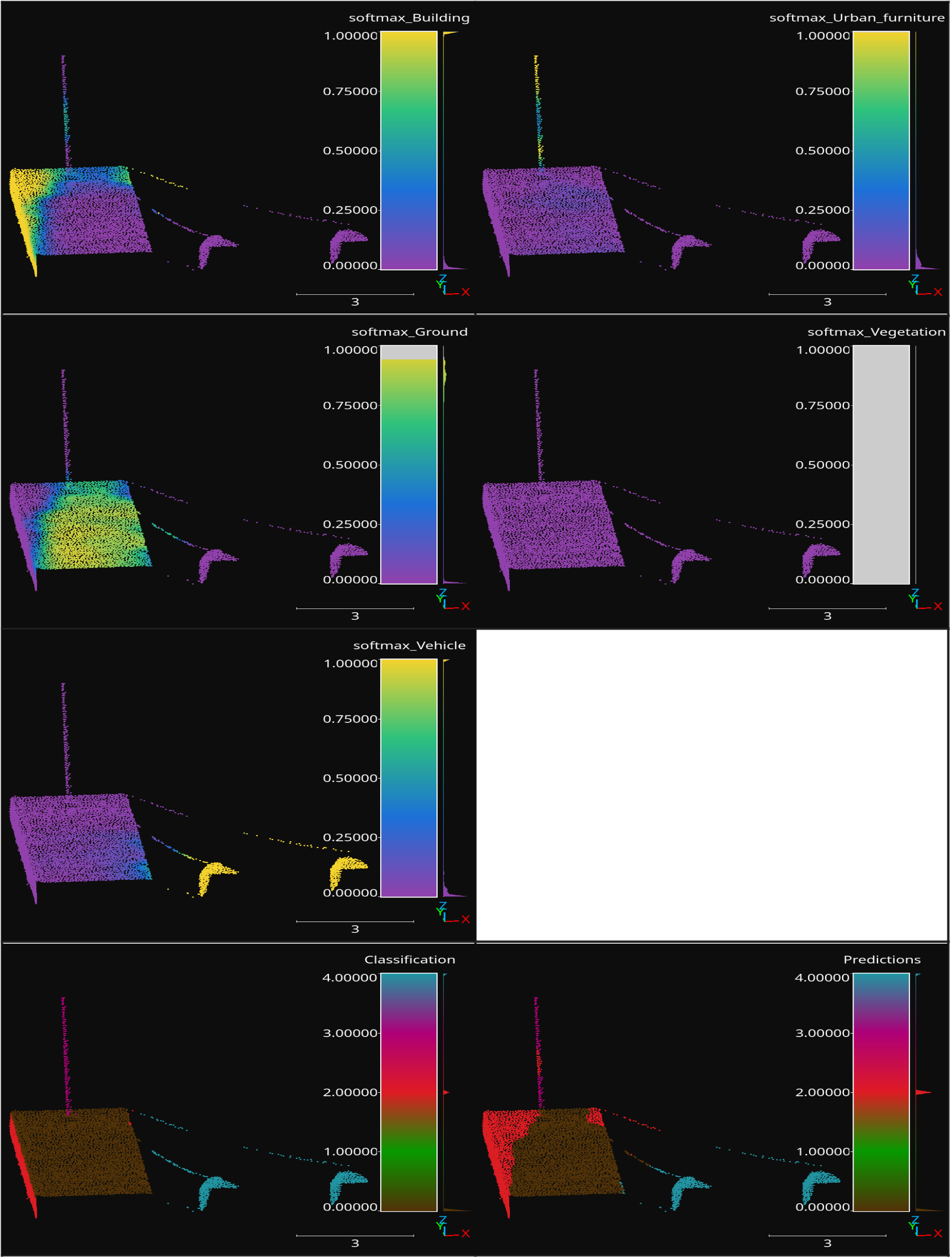
Visualization of a receptive field from a trained PointNet-based classifier. The softmax representation uses a color map from zero (violet) to one (yellow). The classification (reference labels) and predictions use the same color code for the classes.
Predictive pipeline
The predictive pipeline will use the model trained on the first point cloud to compute an urban semantic segmentation on a validation point cloud. More concretely, the validation point cloud corresponds to the March 2018 epoch of the Hessigheim dataset.
The predictions will be exported through the ClassifiedPcloudWriter,
which means the boolean mask on success and fail will be available. Also, the
ClassificationEvaluator will be used to quantify the quality of the
predictions through many evaluation metrics.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/data/Hessigheim_Benchmark/Epoch_March2018/LiDAR/Mar18_val.laz"
],
"out_pcloud": [
"/data/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/Rect3D_alt_5m_T1/validation_rfsep0_4/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/data/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/Rect3D_alt_5m_T1/pipe/Rect3D_5m_T1.pipe"
},
{
"writer": "ClassifiedPcloudWriter",
"out_pcloud": "*predicted.las"
},
{
"writer": "PredictionsWriter",
"out_preds": "*predictions.lbl"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["Ground", "Vegetation", "Building", "Urban furniture", "Vehicle"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
}
]
}
The table below represents the class-wise evaluation metrics. It shows the precision, recall, F1-score, and intersection over union (IoU) for each class. It can be seen that the more populated classes, ground, vegetation, and building yield the best results, while the less frequent classes yield worse results, as expected.
CLASS |
P |
R |
F1 |
IoU |
|---|---|---|---|---|
Ground |
96.422 |
94.760 |
95.584 |
91.542 |
Vegetation |
88.068 |
88.835 |
88.450 |
79.292 |
Building |
85.890 |
92.726 |
89.177 |
80.468 |
Urban furniture |
30.062 |
26.075 |
27.927 |
16.229 |
Vehicle |
67.671 |
20.389 |
31.336 |
18.579 |
The figure below shows the reference and predicted labels, as well as the fail/success boolean mask representing correctly classified (gray) and misclassified (red) points.
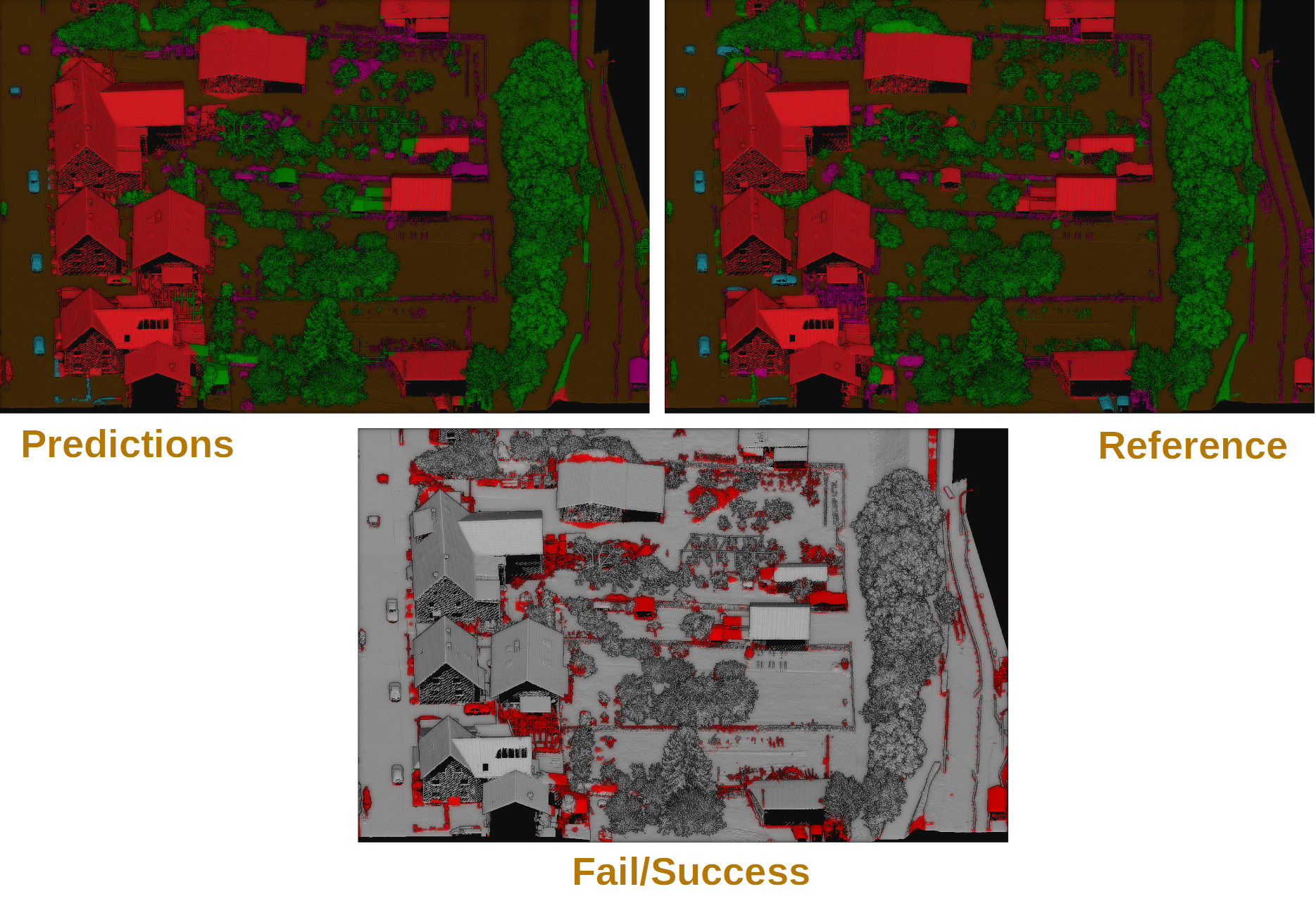
Visualization of the semantic segmentation model applied to previously unseen data. The bottom image shows correctly classified points in gray and misclassified points in red. The predictions and reference images use the same color code for the classes.
PointNet++-based model
This example shows how to define two different pipelines, one to train a
PointNet++-based model (see PointNet++ documentation)
and export it as a PredictivePipeline, the other to use the
predictive pipeline to compute a semantic segmentation on a previously unseen
point cloud. Readers are referred to the
pipelines documentation to read more
about how pipelines work and to see more examples.
Training pipeline
The training pipeline will train a ConvAutoencPwiseClassif for the
multiclass semantic segmentation of the points. The training point cloud is
generated from the March 2018 training point cloud in the
Hessigheim dataset
by transforming the RGB color components to its HSV representation with
HSV from RGB miner.
Note that this model is drastically different compared to the standard PointNet++ architecture (closer to what is shown in the PointNet++ documentation). Thus, this example shows how the VL3D++ framework can be used to update the architecture of an older feature extractor to achieve much better results. In this case, the main difference lies in the use of hourglass blocks for wrapping the PointNet-based feature extractors and also as upsampling layers.
The JSON below corresponds to the commented training pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pnetpp_hourglass/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "PointNet",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.95,
"H_activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"H_initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"H_regularizer": [null, null, null, null, null, null],
"H_constraint": [null, null, null, null, null, null],
"gamma_activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"gamma_kernel_initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"gamma_kernel_regularizer": [null, null, null, null, null, null],
"gamma_kernel_constraint": [null, null, null, null, null, null],
"gamma_bias_enabled": [true, true, true, true, true, true],
"gamma_bias_initializer": ["zeros", "zeros", "zeros", "zeros", "zeros", "zeros"],
"gamma_bias_regularizer": [null, null, null, null, null, null],
"gamma_bias_constraint": [null, null, null, null, null, null],
"activate": true,
"hourglass_wrapper": {
"internal_dim": [2, 2, 4, 16, 32, 64],
"parallel_internal_dim": [8, 8, 16, 32, 64, 128],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"activation2": [null, null, null, null, null, null],
"regularize": [true, true, true, true, true, true],
"W1_initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"W1_regularizer": [null, null, null, null, null, null],
"W1_constraint": [null, null, null, null, null, null],
"W2_initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"W2_regularizer": [null, null, null, null, null, null],
"W2_constraint": [null, null, null, null, null, null],
"loss_factor": 0.1,
"subspace_factor": 0.125,
"feature_dim_divisor": 4,
"bn": false,
"bn_momentum": 0.95,
"out_bn": true,
"out_bn_momentum": 0.95,
"out_activation": "relu"
}
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.95,
"upsampling_hourglass": {
"activation": "relu",
"activation2": null,
"regularize": true,
"W1_initializer": "he_uniform",
"W1_regularizer": null,
"W1_constraint": null,
"W2_initializer": "he_uniform",
"W2_regularizer": null,
"W2_constraint": null,
"loss_factor": 0.1,
"subspace_factor": 0.125
},
"conv1d": true,
"conv1d_kernel_initializer": "he_uniform",
"neck":{
"max_depth": 2,
"hidden_channels": [64, 64],
"kernel_initializer": ["he_uniform", "he_uniform"],
"kernel_regularizer": [null, null],
"kernel_constraint": [null, null],
"bn_momentum": [0.95, 0.95],
"activation": ["relu", "relu"]
},
"output_kernel_initializer": "he_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "AdamW",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2500,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy",
"f1"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/PNetPP.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The figure below represents the evolution among the many training epochs of the categorical accuracy, the F1-score, the loss function, and the learning rate.
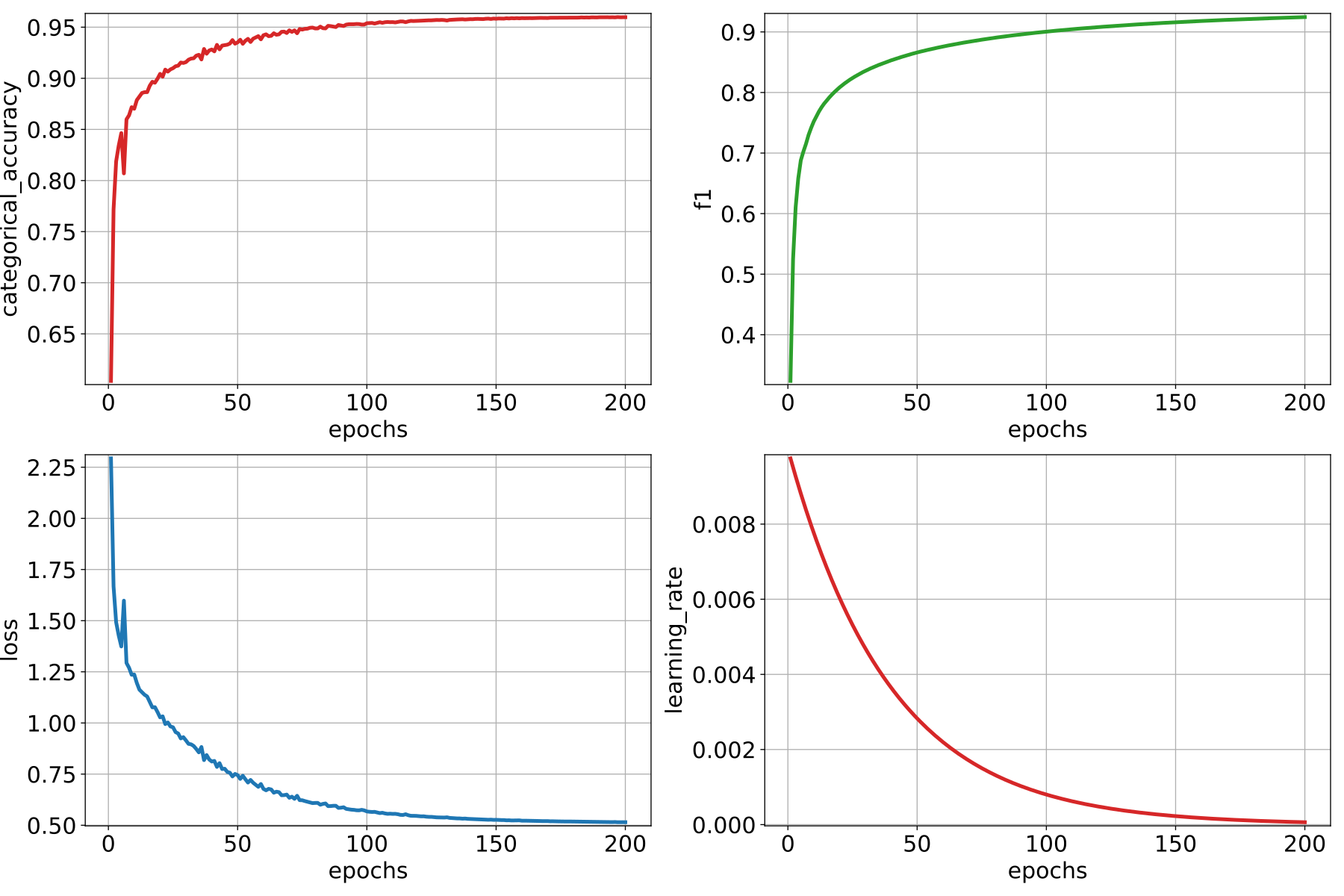
Visualization of the categorical accuracy, the F1-score, the loss function, and the learning rate among \(200\) epochs.
Predictive pipeline
The predictive pipeline will use the model on a validation point cloud from the
same dataset and epoch. The predictions will be evaluated through
ClassificationEvaluator and they will be exported together with their
uncertainties through ClassificationUncertaintyEvaluator.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pnetpp_hourglass/T1/preds/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pnetpp_hourglass/T1/model/PNetPP.pipe"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"confusion_matrix_normalization_strategy": "row",
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": false,
"include_clusters": false,
"weight_by_predictions": false,
"num_clusters": 0,
"clustering_max_iters": 0,
"clustering_batch_size": 0,
"clustering_entropy_weights": false,
"clustering_reduce_function": null,
"gaussian_kernel_points": 256,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
The table below represents the global evaluation metrics. It shows the overall accuracy (OA), precision (P), recall (R), F1-score (F1), the intersection over union (IoU), all of them weighted by the number of points, the Matthew’s correlation coefficient (MCC), and the Cohen’s Kappa score (Kappa).
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
87.123 |
81.237 |
68.394 |
72.862 |
60.193 |
86.649 |
87.123 |
86.524 |
78.050 |
84.052 |
84.011 |
The figure below shows the reference and predicted labels, the class ambiguity as a point-wise uncertainty measurement, and the binary error mask (gray for correctly classified points, red for misclassified ones).
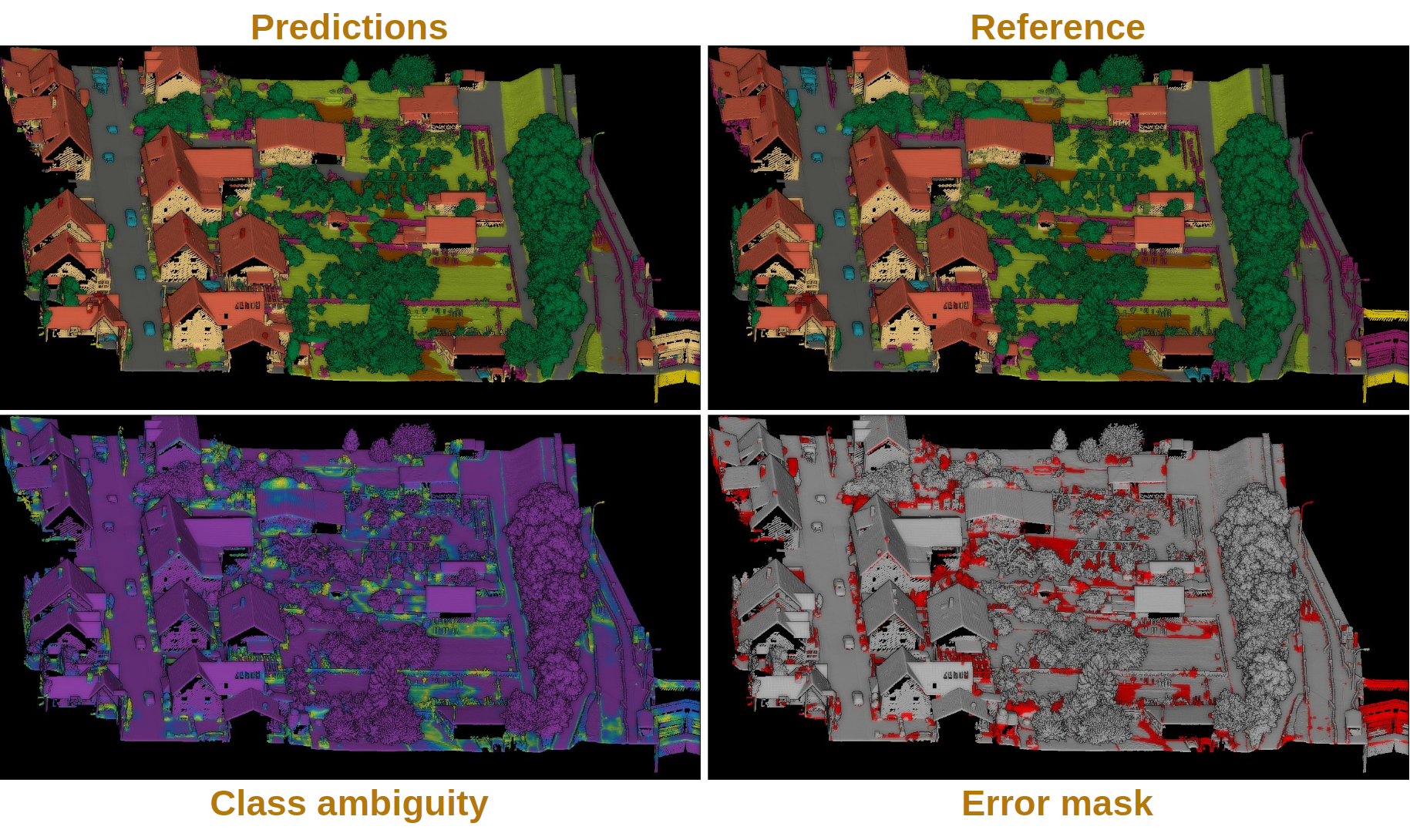
Visualization of the semantic segmentation model applied to previously unseen data. The bottom-right image shows correctly classified points in gray and misclassified points in red. The predictions and reference images use the same color code for the classes. The class ambiguity is represented with purple color for low-uncertainty regions and yellow for high-uncertainty ones.
KPConv-based model
This example shows how to define two different pipelines, one to train a
KPConv-based model (see KPConv documentation)
and export it as a PredictivePipeline, the other to use the
predictive pipeline to compute a semantic segmentation on a previously unseen
point cloud. Readers are referred to the
pipelines documentation to read more
about how pipelines work and to see more examples.
Standardization
The reflectance values in the point clouds considered for this example have
been standardized. To reproduce the standardization, build a pipeline with
a Standardizer as shown below:
{
"feature_transformer": "Standardizer",
"fnames": ["Reflectance", "HSV_Hrad", "HSV_S", "HSV_V"],
"center": true,
"scale": true,
"report_path": "*standardization.log"
}
Finally, add a PredictivePipelineWriter as shown below so the same
standardization can be applied to any point cloud later on:
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*STD.pipe",
"ignore_predictions": true,
"include_writer": false
"include_imputer": false,
"include_feature_transformer": true,
"include_miner": false,
"include_class_transformer": false
}
Training pipeline
The training pipeline will train a ConvAutoencPwiseClassif for the
multiclass urban semantic segmentation of the points. The training point cloud
is the one given in the March 2018 epoch of the
Hessigheim dataset
. However, its reflectance values have been preprocessed using a
Standardizer to have a convenient scale.
The receptive fields are computed following a hierarchical furthest point subsampling strategy such that the hierarchy of receptive field starts with \(512\) points and ends with \(32\). The receptive fields are built from 3D spherical neighborhoods with a radius) of \(3\,\mathrm{m}\).
The first downsampling (i.e., the one that maps the original input neighborhood to the first receptive field) considers only the nearest neighbor. However, the second, third, fourth, and fifth dowsnamplings consider \(16\), \(8\), \(8\), and \(4\) closest neighbors, respectively. The upsampling layers preserve the same number of nearest neighbors. The first neighborhood considered by a KPConv layer knows the \(32\) nearest neighbors instead of only the first one.
The KPConv and strided KPConv layers start with \(64\) output features but end with \(1024\), applying batch normalization during training. The kernels are activated and the influence distance of each kernel point is the same as the kernel radius. Strided kernel point convolutions are used for the downsampling instead of typical faetures downsampling strategies like nearest downsampling, mean, or gaussian RBF.
The JSON below corresponds to the described training pipeline.
{
"in_pcloud": [
"/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/vl3d/kpconv_R/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["Reflectance", "ones"],
"random_seed": null,
"model_args": {
"fnames": ["Reflectance", "ones"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 60000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 2000,
"support_strategy_fast": true,
"center_on_pcloud": true,
"neighborhood": {
"type": "sphere",
"radius": 3.0,
"separation_factor": 0.8
},
"num_points_per_depth": [512, 256, 128, 64, 32],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 8, 8, 4],
"num_pwise_neighbors": [32, 16, 16, 8, 4],
"num_upsampling_neighbors": [1, 16, 8, 8, 4],
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"receptive_fields_dir": null,
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"feature_extraction": {
"type": "KPConv",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.0,
"activate": true,
"sigma": [3.0, 3.0, 3.0, 3.0, 3.0, 3.0],
"kernel_radius": [3.0, 3.0, 3.0, 3.0, 3.0, 3.0],
"num_kernel_points": [15, 15, 15, 15, 15, 15],
"deformable": [false, false, false, false, false, false],
"W_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W_regularizer": [null, null, null, null, null, null],
"W_constraint": [null, null, null, null, null, null]
},
"structure_alignment": null,
"features_alignment": null,
"downsampling_filter": "strided_kpconv",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.0,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"kpconv_representation_dir": "*/training_eval/kpconv_layers/",
"skpconv_representation_dir": "*/training_eval/skpconv_layers/",
"class_weight": [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
"training_epochs": 300,
"batch_size": 16,
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "SGD",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 15000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*pipe/KPC_T1.pipe",
"include_writer": false,
"include_imputer": false,
"include_feature_transformer": false,
"include_miner": false,
"include_class_transformer": false
}
]
}
The table below represents the distribution of reference and predicted labels on the training dataset. The class imbalance can be clearly observed. In this example, no specific measurements (e.g., class weights) have been applied to mitigate the class imbalance.
CLASS |
PRED. COUNT |
PRED. PERCENT. |
TRUE COUNT |
TRUE PERCENT. |
|---|---|---|---|---|
LowVeg |
21811274 |
36.691 |
21375614 |
35.959 |
ImpSurf |
11792241 |
19.837 |
10419635 |
17.528 |
Vehicle |
258552 |
0.435 |
258032 |
0.434 |
UrbanFurni |
1135250 |
1.910 |
1159205 |
1.950 |
Roof |
6288841 |
10.579 |
6279431 |
10.563 |
Facade |
1316401 |
2.214 |
1198227 |
2.016 |
Shrub |
1001650 |
1.685 |
1077141 |
1.812 |
Tree |
8034373 |
13.516 |
8086818 |
13.604 |
Soil/Gravel |
6892247 |
11.594 |
8590706 |
14.451 |
VertSurf |
888070 |
1.494 |
974976 |
1.640 |
Chimney |
26207 |
0.044 |
25321 |
0.043 |
The figure below represents the distribution of the classes along the receptive fields. The blue histograms represent the absolute frequency (i.e., count of points) for each class. The red histograms count the number of receptive fields with at least on point of a given class. The top row counts the predictions, the bottom row counts the labels.
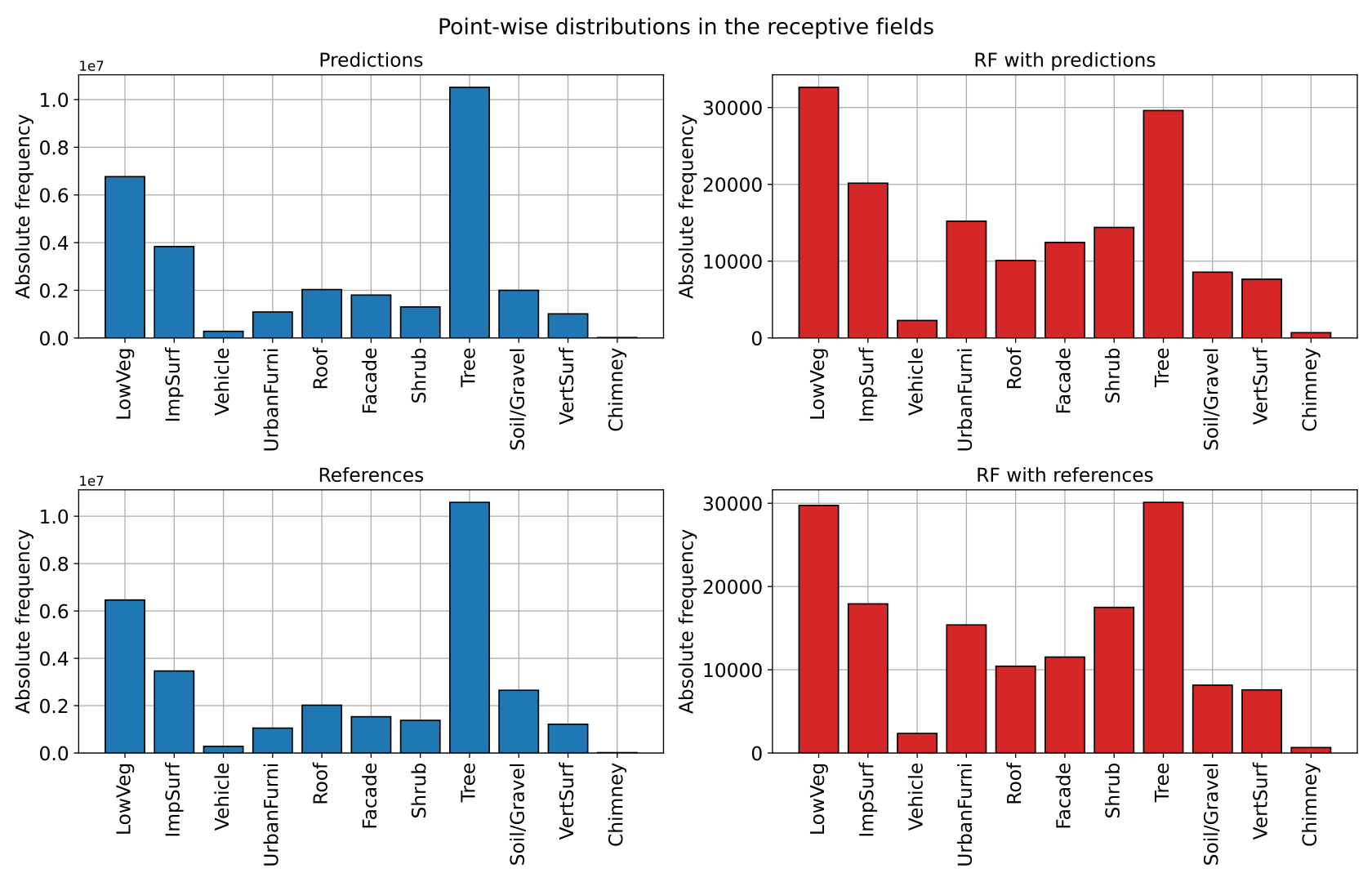
Visualization of the distribution of classes along the receptive fields. Blue for straightforward absolute frequencies, red for counting receptive fields with at least one case of a given class.
Predictive pipeline
The predictive pipeline will use the model trained on the first point cloud to
compute an urban semantic segmentation on a validation point cloud.
More concretely, the validation point cloud corresponds to the March 2018
epoch of the
Hessigheim dataset.
The same Standardizer used to standardize the reflectance values of
the training point cloud has been used with the validation point cloud. Using
the same Standardizer implies considering the mean and standard
deviation from the distribution of the training dataset.
The predictions will be exported through the ClassifiedPcloudWriter,
which means the boolean mask on success and fail will be available. Also, the
ClassificationEvaluator will be used to quantify the quality of the
predictions through many evaluation metrics. Uncertainty measurements are also
computed through the ClassificationUncertaintyEvaluator.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/vl3d/kpconv_R/T1/preds/val/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/mnt/netapp2/Store_uscciaep/lidar_data/hessigheim/vl3d/kpconv_R/T1/pipe/KPC_T1.pipe"
},
{
"writer": "ClassifiedPcloudWriter",
"out_pcloud": "*predicted.las"
},
{
"writer": "PredictionsWriter",
"out_preds": "*predictions.lbl"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": true,
"include_clusters": true,
"weight_by_predictions": false,
"num_clusters": 10,
"clustering_max_iters": 128,
"clustering_batch_size": 1000000,
"clustering_entropy_weights": false,
"clustering_reduce_function": "mean",
"gaussian_kernel_points": 256,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
The table below represents the class-wise evaluation metrics. It shows the precision, recall, F1-score, and intersection over union (IoU) for each class. It can be seen that it is especially problematic to differentiate soil/gravel terrain, as evidenced by its low recall. Besides, roofs are segmented with high recall and precision at the same time. Together with trees, they are clearly the best segmented classes.
CLASS |
P |
R |
F1 |
IoU |
|---|---|---|---|---|
LowVeg |
70.550 |
94.794 |
80.895 |
67.918 |
ImpSurf |
90.089 |
74.809 |
81.741 |
69.121 |
Vehicle |
97.718 |
23.371 |
37.720 |
23.244 |
UrbanFurni |
57.470 |
51.726 |
54.447 |
37.407 |
Roof |
94.906 |
92.246 |
93.557 |
87.894 |
Facade |
73.114 |
83.084 |
77.781 |
63.640 |
Shrub |
75.357 |
40.615 |
52.782 |
35.853 |
Tree |
89.740 |
98.147 |
93.756 |
88.245 |
Soil/Gravel |
46.839 |
4.148 |
7.620 |
3.961 |
VertSurf |
83.127 |
39.119 |
53.201 |
36.241 |
Chimney |
83.920 |
77.021 |
80.323 |
67.116 |
The figure below shows the reference and predicted labels, as well as the fail/success boolean mask representing correctly classified (gray) and misclassified (red) points.
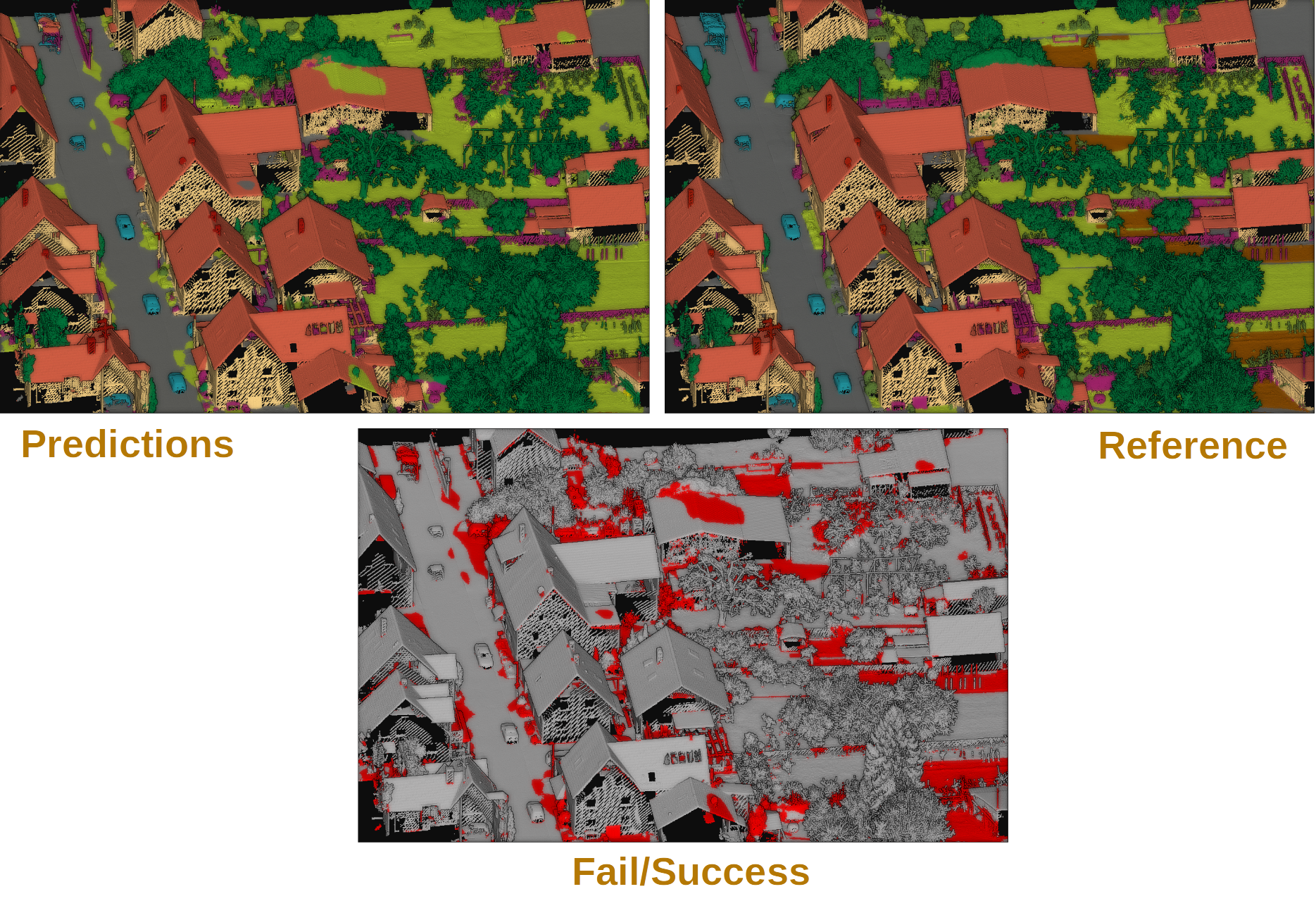
Visualization of the semantic segmentation model applied to previously unseen data. The bottom image shows correctly classified points in gray and misclassified points in red. The predictions and reference images use the same color code for the classes.
SFL-NET-like model
This example shows how to define two different pipelines, one to train a
SFL-NET-like model (see SFL-NET documentation)
and export it as a PredictivePipeline, the other to use the
predictive pipeline to compute a semantic segmentation on a previously unseen
point cloud. Readers are referred to the
pipelines documentation to read more
about how pipelines work and to see more examples.
Training pipeline
The training pipeline will train a ConvAutoencPwiseClassif for the
multiclass semantic segmentation of the points. The training point cloud
is the “5080_54435” point cloud in the
DALES dataset
.
The pre-processing strategy computes \(200,000\) receptive fields with \(256\) points at the first depth taken from a spherical neighborhood with a radius of \(6\) meters. It uses an oversampling strategy based on the nearest neighbor to populate receptive fields with not enough points.
The first downsampling (i.e., the one that maps the original input neighborhood to the first receptive field) considers only the nearest neighbor. However, subsequent receptive fields consider \(16\) neighbors when downsampling. The upsampling layers work with the same number of nearest neighbors. The hourglasses are configured with the hyperparameters suggested in the SFL-NET paper (Li et al., 2023) , including the residual hourglass block.
The JSON below corresponds to the described training pipeline.
{
"in_pcloud": [
"/oldext4/lidar_data/vl3dhack/data/dales/train/5080_54435.laz"
],
"out_pcloud": [
"/oldext4/lidar_data/vl3dhack/multiclass/out/DL_SFLNET/T1/*"
],
"sequential_pipeline": [
{
"class_transformer": "ClassReducer",
"on_predictions": false,
"input_class_names": ["noclass", "ground", "vegetation", "cars", "trucks", "powerlines", "fences", "poles", "buildings"],
"output_class_names": ["ground", "vegetation", "buildings", "powerlines", "objects", "noclass"],
"class_groups": [["ground"], ["vegetation"], ["buildings"], ["powerlines"], ["cars", "trucks", "fences", "poles"], ["noclass"]],
"report_path": "*class_reduction.log",
"plot_path": "*class_reduction.svg"
},
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones"],
"random_seed": null,
"model_args": {
"fnames": ["ones"],
"num_classes": 6,
"class_names": ["ground", "vegetation", "buildings", "powerlines", "objects", "noclass"],
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 200000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 10000,
"support_strategy_fast": true,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"neighborhood": {
"type": "sphere",
"radius": 6.0,
"separation_factor": 0.8
},
"num_points_per_depth": [256, 128, 64, 32, 16],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"training_receptive_fields_dir": "*/training_eval/training_rf/",
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"receptive_fields_dir": "*/training_eval/receptive_fields/",
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"feature_extraction": {
"type": "LightKPConv",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.98,
"activate": true,
"sigma": [6.0, 6.0, 7.5, 9.0, 10.5, 12.0],
"kernel_radius": [6.0, 6.0, 6.0, 6.0, 6.0, 6.0],
"num_kernel_points": [15, 15, 15, 15, 15, 15],
"deformable": [false, false, false, false, false, false],
"W_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W_regularizer": [null, null, null, null, null, null],
"W_constraint": [null, null, null, null, null, null],
"A_trainable": [true, true, true, true, true ,true],
"A_regularizer": [null, null, null, null, null, null],
"A_constraint": [null, null, null, null, null, null],
"A_initializer": ["ones", "ones", "ones", "ones", "ones", "ones"],
"hourglass_wrapper": {
"internal_dim": [2, 2, 4, 16, 32, 64],
"parallel_internal_dim": [8, 8, 16, 32, 64, 128],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"activation2": [null, null, null, null, null, null],
"regularize": [true, true, true, true, true, true],
"W1_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W1_regularizer": [null, null, null, null, null, null],
"W1_constraint": [null, null, null, null, null, null],
"W2_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W2_regularizer": [null, null, null, null, null, null],
"W2_constraint": [null, null, null, null, null, null],
"loss_factor": 0.1,
"subspace_factor": 0.125,
"feature_dim_divisor": 4,
"bn": false,
"bn_momentum": 0.98,
"out_bn": true,
"out_bn_momentum": 0.98,
"out_activation": "relu"
}
},
"features_alignment": null,
"downsampling_filter": "strided_lightkpconv",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"upsampling_hourglass": {
"activation": "relu",
"activation2": null,
"regularize": true,
"W1_initializer": "glorot_uniform",
"W1_regularizer": null,
"W1_constraint": null,
"W2_initializer": "glorot_uniform",
"W2_regularizer": null,
"W2_constraint": null,
"loss_factor": 0.1,
"subspace_factor": 0.125
},
"conv1d": false,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 0.0],
"training_epochs": 300,
"batch_size": 64,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.99,
"end": 1.01
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.001
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 9000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/SFLNET.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The figure below represents the \(200,000\) training the support points. The SFL-NET model has been trained on \(200,000\) spherical neighborhoods (with \(6\) meters radius) of \(256\) neighbors each, i.e., a total number of \(51,200,000\) points have been used for training.
Visualization of the \(200,000\) training support points used as the centers of the spherical neighborhoods used during training.
Predictive pipeline
The predictive pipeline will use the model trained on the first point cloud to compute the multiclass semantic segmentation on a validation point cloud. More concretely, the validation point cloud corresponds to the “5145_54470” point cloud of the DALES dataset .
The predictions will be exported through the ClassifiedPcloudWriter,
which means the boolean mask on success and fail will be available. Also, the
ClassificationEvaluator will be used to quantify the quality of the
predictions through many evaluation metrics. Uncertainty measurements are also
computed through the ClassificationUncertaintyEvaluator.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/oldext4/lidar_data/vl3dhack/data/dales/test/5145_54470.laz"
],
"out_pcloud": [
"/oldext4/lidar_data/vl3dhack/multiclass/out/DL_SFLNET/T1/pred/5145_54470/*"
],
"sequential_pipeline": [
{
"class_transformer": "ClassReducer",
"on_predictions": false,
"input_class_names": ["noclass", "ground", "vegetation", "cars", "trucks", "powerlines", "fences", "poles", "buildings"],
"output_class_names": ["ground", "vegetation", "buildings", "powerlines", "objects", "noclass"],
"class_groups": [["ground"], ["vegetation"], ["buildings"], ["powerlines"], ["cars", "trucks", "fences", "poles"], ["noclass"]],
"report_path": "*class_reduction.log",
"plot_path": "*class_reduction.svg"
},
{
"predict": "PredictivePipeline",
"model_path": "/oldext4/lidar_data/vl3dhack/multiclass/out/DL_SFLNET/T1/model/SFLNET.pipe",
"nn_path": null
},
{
"eval": "ClassificationEvaluator",
"class_names": ["ground", "vegetation", "buildings", "powerlines", "objects", "noclass"],
"ignore_classes": ["noclass"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*/report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*/report/confusion_matrix.svg",
"class_distribution_report_path": "*/report/class_distribution.log",
"class_distribution_plot_path": "*/report/class_distribution.svg"
},
{
"writer": "ClassifiedPcloudWriter",
"out_pcloud": "*predicted.las"
}
]
}
The table below represents the global evaluation metrics. It shows the overall accuracy (OA), precision (P), recall (R), F1-score (F1), intersection over union (IoU), all of them weighted by the number of points, the Matthew’s correlation coefficient (MCC), and the Cohen’s Kappa score (Kappa).
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
96.739 |
90.228 |
89.519 |
89.806 |
82.580 |
96.706 |
96.739 |
96.699 |
93.753 |
94.850 |
94.827 |
The figure below shows the reference and predicted labels, as well as the fail/success boolean mask representing correctly classified (gray) and misclassified (red) points.
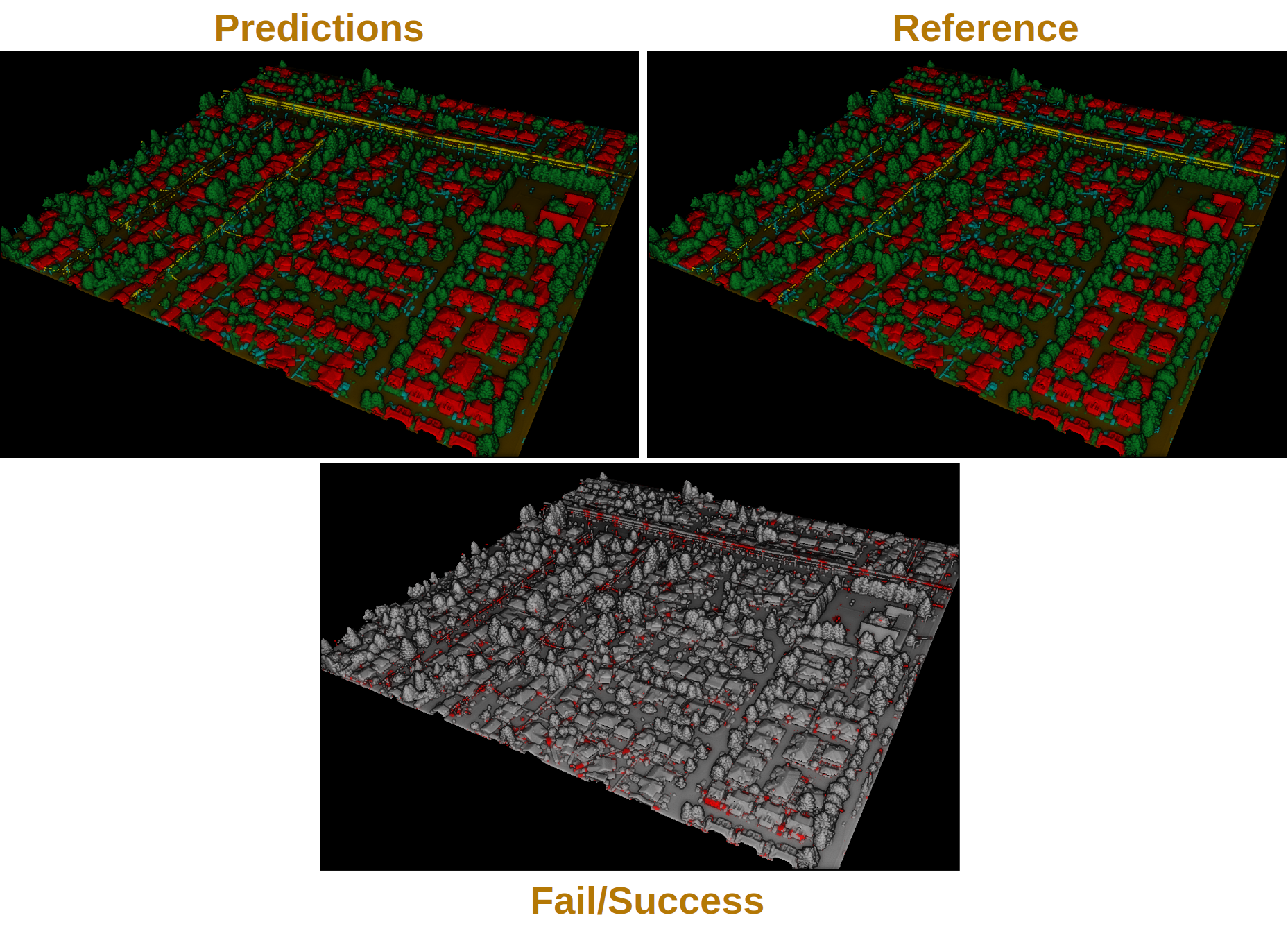
Visualization of the semantic segmentation model applied to previously unseen data. The bottom image shows correctly classified points in gray and misclassified points in red. The predictions and reference images use the same color code for the classes.
PointTransformer-based model
This example shows how to define two different pipelines, one to train a
PointTransformer-based model (see
PointTransformer documentation)
and export it as a PredictivePipeline, the other to use the predictive
pipeline to compute a semantic segmentation on a previously unseen point cloud.
Readers are referred to the
pipelines documentation to read more
about how pipelines work and to see more examples.
Training pipeline
The training pipeline will train a ConvAutoencPwiseClassif for the
multiclass semantic segmentation of the points. The training point cloud is
generated from the March 2018 training point cloud in the
Hessigheim dataset
by transforming the RGB color components to its HSV representation with
HSV from RGB miner.
The pre-processing strategy computes \(25,000\) receptive fields with \(4096\) points at the first depth taken from a spherical neighborhood with a radius of \(5\) meters. It uses an oversampling strategy based on nearest neighbors to populate receptive fields with not enough points.
The first downsampling (i.e., the one that maps the original input neighborhood to the first receptive field) considers the closest neighbor. Subsequent receptive fields consider the mean of the \(16\) closest neighbors when downsampling. The upsampling layers work with the same number of nearest neighbors. Besides, an Hourglass blocks are used both to wrap the main branch and to compute a parallel branch.
The JSON below corresponds to the described training pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pttransf/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "PointTransformer",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 96, 128, 192, 256],
"bn": false,
"bn_momentum": 0.98,
"activate": false,
"Phi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Phi_regularizer": [null, null, null, null, null, null],
"Phi_constraint": [null, null, null, null, null, null],
"Psi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Psi_regularizer": [null, null, null, null, null, null],
"Psi_constraint": [null, null, null, null, null, null],
"A_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"A_regularizer": [null, null, null, null, null, null],
"A_constraint": [null, null, null, null, null, null],
"Gamma_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Gamma_regularizer": [null, null, null, null, null, null],
"Gamma_constraint": [null, null, null, null, null, null],
"Theta_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Theta_regularizer": [null, null, null, null, null, null],
"Theta_constraint": [null, null, null, null, null, null],
"ThetaTilde_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaTilde_regularizer": [null, null, null, null, null, null],
"ThetaTilde_constraint": [null, null, null, null, null, null],
"phi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"phi_regularizer": [null, null, null, null, null, null],
"phi_constraint": [null, null, null, null, null, null],
"psi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"psi_regularizer": [null, null, null, null, null, null],
"psi_constraint": [null, null, null, null, null, null],
"a_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"a_regularizer": [null, null, null, null, null, null],
"a_constraint": [null, null, null, null, null, null],
"gamma_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"gamma_regularizer": [null, null, null, null, null, null],
"gamma_constraint": [null, null, null, null, null, null],
"theta_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"theta_regularizer": [null, null, null, null, null, null],
"theta_constraint": [null, null, null, null, null, null],
"thetaTilde_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaTilde_regularizer": [null, null, null, null, null, null],
"thetaTilde_constraint": [null, null, null, null, null, null],
"hourglass_wrapper": {
"internal_dim": [2, 2, 4, 16, 32, 64],
"parallel_internal_dim": [8, 8, 16, 32, 64, 128],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"activation2": [null, null, null, null, null, null],
"activate_postwrap": true,
"activate_residual": false,
"regularize": [true, true, true, true, true, true],
"W1_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W1_regularizer": [null, null, null, null, null, null],
"W1_constraint": [null, null, null, null, null, null],
"W2_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W2_regularizer": [null, null, null, null, null, null],
"W2_constraint": [null, null, null, null, null, null],
"loss_factor": 0.1,
"subspace_factor": 0.125,
"feature_dim_divisor": 4,
"bn": false,
"merge_bn": false,
"bn_momentum": 0.98,
"out_bn": true,
"out_bn_momentum": 0.98,
"out_activation": "relu"
}
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"conv1d": false,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 32,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 1000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/PointTransformer.pipe",
"include_writer": false,
"include_imputer": false,
"include_feature_transformer": false,
"include_miner": false,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The figure below represents the evolution among the many training epochs of the categorical accuracy, the categorical cross-entropy loss, and the learning rate.
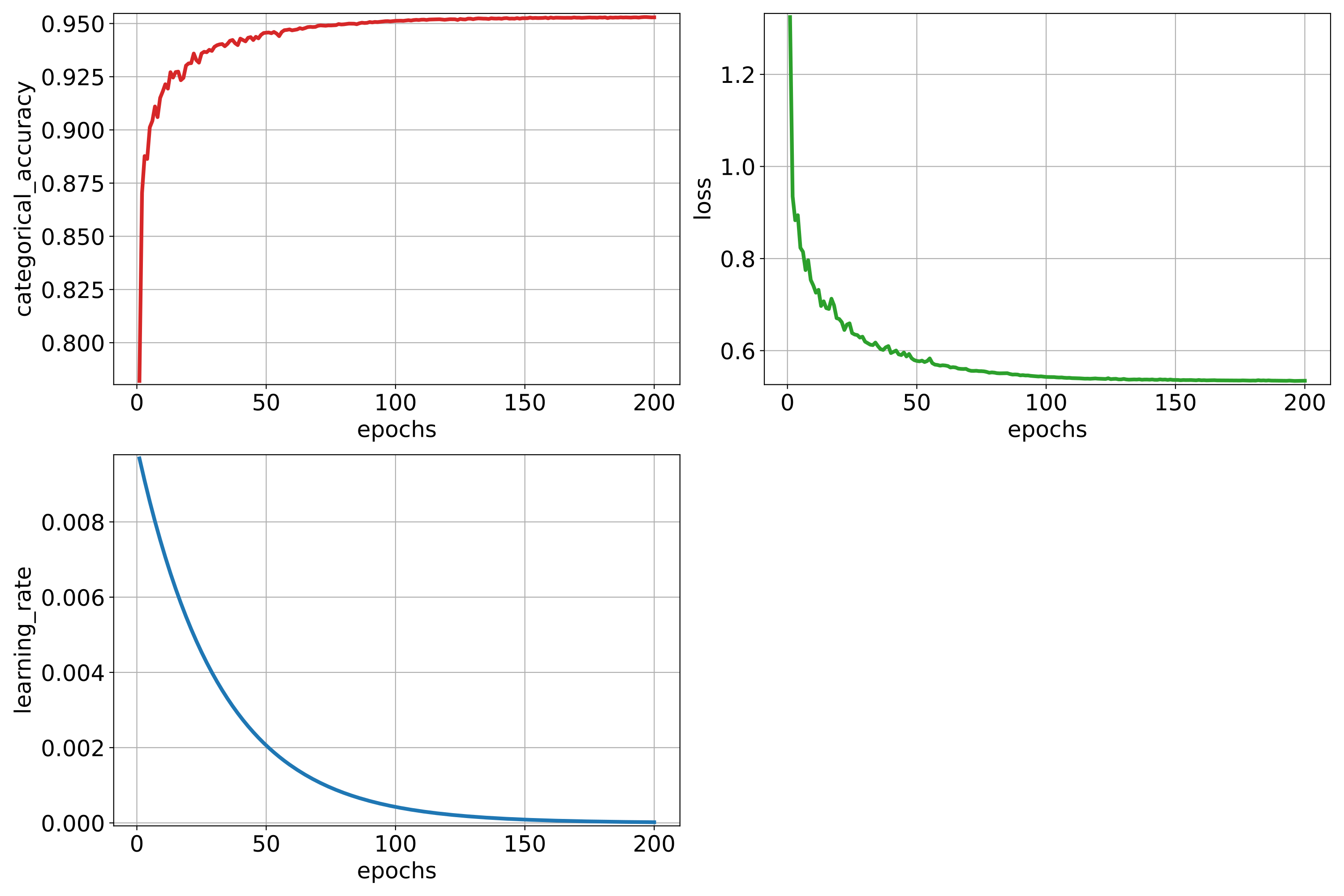
Visualization of the categorical accuracy, the categorical cross-entropy loss, and the learning rate among \(200\) epochs.
Predictive pipeline
The predictive pipeline will use the model on a validation point cloud from the
same dataset and epoch. The predictions will be evaluated through
ClassificationEvaluator and they will be exported together with their
uncertainties through ClassificationUncertaintyEvaluator.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pttransf/T1/preds/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pttransf/T1/model/PointTransformer.pipe"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": false,
"include_clusters": false,
"weight_by_predictions": false,
"num_clusters": 0,
"clustering_max_iters": 0,
"clustering_batch_size": 0,
"clustering_entropy_weights": false,
"clustering_reduce_function": null,
"gaussian_kernel_points": 0,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
The table below represents the global evaluation metrics. It shows the overall accuracy (OA), precision (P), recall (R), F1-score (F1), intersection over union (IoU), all of them weighted by the number of points, the Matthew’s correlation coefficient (MCC), and the Cohen’s Kappa score (Kappa).
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
87.721 |
81.267 |
70.418 |
74.237 |
62.021 |
86.984 |
87.721 |
86.813 |
78.751 |
84.803 |
84.715 |
The figure below shows the reference and predicted labels, the class ambiguity as a point-wise uncertainty measurement, and the binary error mask (gray for correctly classified points, red for misclassified ones).
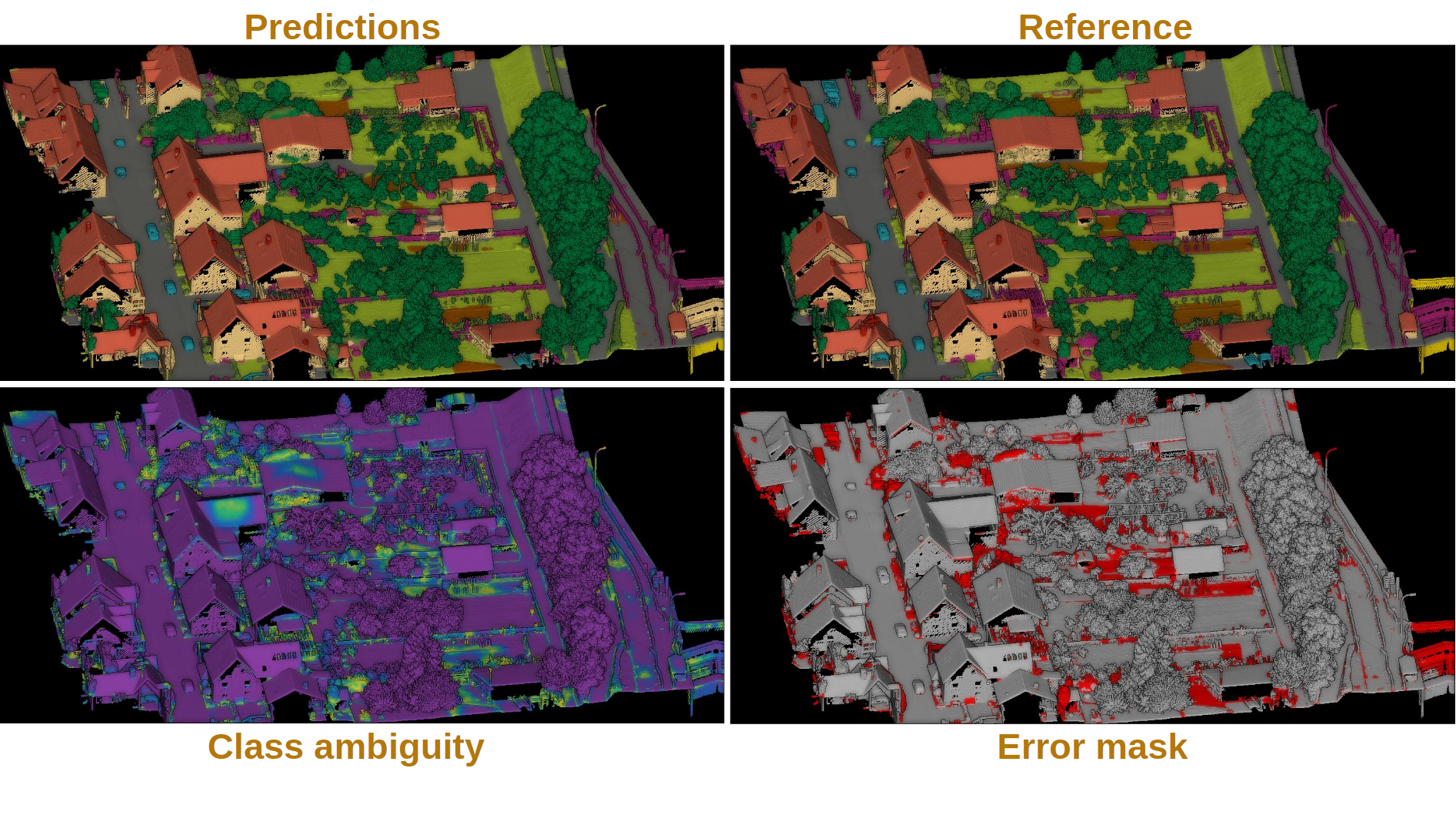
Visualization of the semantic segmentation model applied to previously unseen data. The bottom-right image shows correctly classified points in gray and misclassified points in red. The predictions and reference images use the same color code for the classes. The class ambiguity is represented with purple color for low-uncertainty regions and yellow for high-uncertainty ones.
GroupedPointTransformer-based model
This example shows how to define two different pipelines, one to train a
GroupedPointTransformer-based model (see
GroupedPointTransformer documentation)
and export it as a PredictivePipeline, the other to use the predictive
pipeline to compute a semantic segmentation on a previously unseen point cloud.
Readers are referred to the
pipelines documentation to read more about how pipelines
work and to see more examples.
Training pipeline
The training pipeline will train a ConvAutoencPwiseClassif for the
multiclass semantic segmentation of the points. The training point cloud is
generated from the March 2018 training point cloud in the
Hessigheim dataset
by transforming the RGB color components to its HSV representation with
HSV from RGB miner.
The pre-processing strategy computes \(25,000\) receptive fields with \(4096\) points at the first depth taken from a spherical neighborhood with a radius of \(5\) meters. It uses an oversampling strategy based on nearest neighbors to populate receptive fields with not enough points.
The first downsampling (i.e., the one that maps the original input neighborhood to the first receptive field) considers the closest neighbor. Subsequent receptive fields consider the mean of the \(16\) closest neighbors when downsampling. The upsampling layers work with the same number of nearest neighbors.
The JSON below corresponds to the described training pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/gpttransf/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "GroupedPointTransformer",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 96, 128, 192, 256],
"init_ftransf_bn": true,
"init_ftransf_bn_momentum": 0.98,
"groups": [8, 8, 12, 16, 24, 32],
"dropout_rate": [0.25, 0.25, 0.25, 0.25, 0.25, 0.25],
"bn": false,
"bn_momentum": 0.98,
"activate": false,
"Q_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Q_regularizer": [null, null, null, null, null, null],
"Q_constraint": [null, null, null, null, null, null],
"Q_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"q_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"q_regularizer": [null, null, null, null, null, null],
"q_constraint": [null, null, null, null, null, null],
"K_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"K_regularizer": [null, null, null, null, null, null],
"K_constraint": [null, null, null, null, null, null],
"K_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"k_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"k_regularizer": [null, null, null, null, null, null],
"k_constraint": [null, null, null, null, null, null],
"V_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"V_regularizer": [null, null, null, null, null, null],
"V_constraint": [null, null, null, null, null, null],
"v_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"v_regularizer": [null, null, null, null, null, null],
"v_constraint": [null, null, null, null, null, null],
"ThetaA_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaA_regularizer": [null, null, null, null, null, null],
"ThetaA_constraint": [null, null, null, null, null, null],
"thetaA_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaA_regularizer": [null, null, null, null, null, null],
"thetaA_constraint": [null, null, null, null, null, null],
"ThetaTildeA_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaTildeA_regularizer": [null, null, null, null, null, null],
"ThetaTildeA_constraint": [null, null, null, null, null, null],
"thetaTildeA_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaTildeA_regularizer": [null, null, null, null, null, null],
"thetaTildeA_constraint": [null, null, null, null, null, null],
"deltaA_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"ThetaB_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaB_regularizer": [null, null, null, null, null, null],
"ThetaB_constraint": [null, null, null, null, null, null],
"thetaB_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaB_regularizer": [null, null, null, null, null, null],
"thetaB_constraint": [null, null, null, null, null, null],
"ThetaTildeB_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"ThetaTildeB_regularizer": [null, null, null, null, null, null],
"ThetaTildeB_constraint": [null, null, null, null, null, null],
"thetaTildeB_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"thetaTildeB_regularizer": [null, null, null, null, null, null],
"thetaTildeB_constraint": [null, null, null, null, null, null],
"deltaB_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"Omega_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Omega_regularizer": [null, null, null, null, null, null],
"Omega_constraint": [null, null, null, null, null, null],
"omega_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"omega_regularizer": [null, null, null, null, null, null],
"omega_constraint": [null, null, null, null, null, null],
"omega_bn_momentum": [0.98, 0.98, 0.98, 0.98, 0.98, 0.98],
"OmegaTilde_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"OmegaTilde_regularizer": [null, null, null, null, null, null],
"OmegaTilde_constraint": [null, null, null, null, null, null],
"omegaTilde_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"omegaTilde_regularizer": [null, null, null, null, null, null],
"omegaTilde_constraint": [null, null, null, null, null, null]
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"conv1d": false,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 32,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 1000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/PointTransformer.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The figure below represents the evolution among the many training epochs of the categorical accuracy, the categorical cross-entropy loss, and the learning rate.
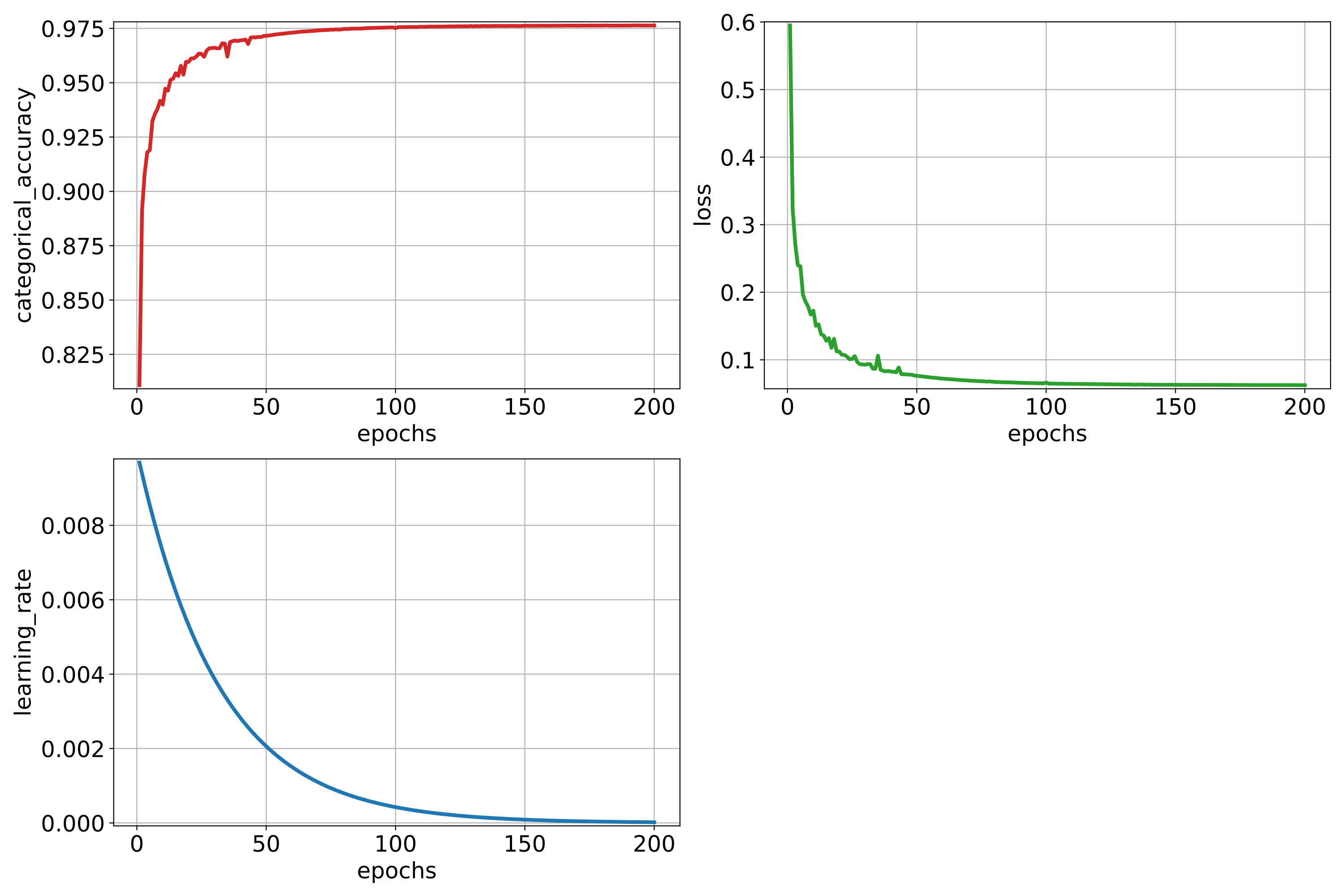
Visualization of the categorical accuracy, the categorical cross-entropy loss, and the learning rate among \(200\) epochs.
Predictive pipeline
The predictive pipeline will use the model on a validation point cloud from the
same dataset and epoch. The predictions will be evaluated through
ClassificationEvaluator and they will be exported together with their
uncertainties through ClassificationUncertaintyEvaluator.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/gpttransf/T1/preds/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/gpttransf/T1/model/PointTransformer.pipe"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": false,
"include_clusters": false,
"weight_by_predictions": false,
"num_clusters": 0,
"clustering_max_iters": 0,
"clustering_batch_size": 0,
"clustering_entropy_weights": false,
"clustering_reduce_function": null,
"gaussian_kernel_points": 0,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
The table below represents the global evaluation metrics. It shows the overall accuracy (OA), precision (P), recall (R), F1-score (F1), intersection over union (IoU), all of them weighted by the number of points, the Matthew’s correlation coefficient (MCC), and the Cohen’s Kappa score (Kappa).
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
88.321 |
81.272 |
72.783 |
76.021 |
64.319 |
87.675 |
88.321 |
87.674 |
79.734 |
85.532 |
85.475 |
The figure below shows the reference and predicted labels, the class ambiguity as a point-wise uncertainty measurement, and the binary error mask (gray for correctly classified points, red for misclassified ones).
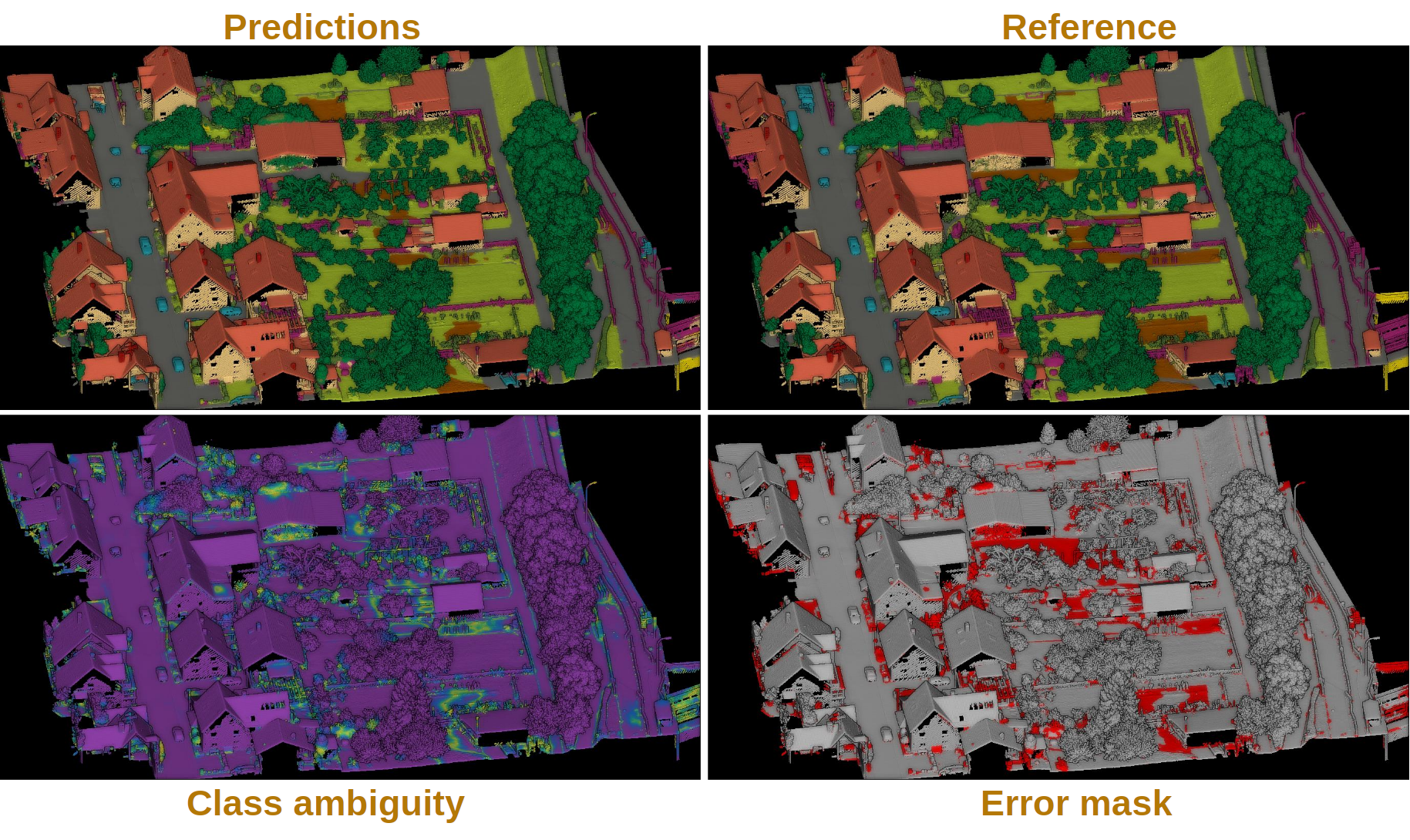
Visualization of the semantic segmentation model applied to previously unseen data. The bottom-right image shows correctly classified points in gray and misclassified points in red. The predictions and reference images use the same color code for the classes. The class ambiguity is represented with purple color for low-uncertainty regions and yellow for high-uncertainty ones.
PointMLP-based model
This example shows how to define two different pipelines, one to train a
PointMLP-based model (see
Hierarchical PointMLP documentation)
and export it as a PredictivePipeline, the other to use the predictive
pipeline to compute a semantic segmentation on a previously unseen point cloud.
Readers are referred to the
pipelines documentation to read more about how pipelines
work and to see more examples.
Training pipeline
The training pipeline will train a ConvAutoencPwiseClassif for the
multiclass semantic segmentation of the points. The training point cloud is
generated from the March 2018 training point cloud in the
Hessigheim dataset
by transforming the RGB color components to its HSV representation with
HSV from RGB miner.
The pre-processing strategy computes \(25,000\) receptive fields with \(4096\) points at the first depth taken from a spherical neighborhood with a radius of \(5\) meters. It uses an oversampling strategy based on nearest neighbors to puplate receptive fields with not enough points.
The first downsampling (i.e., the one that maps the original input neighborhood to the first receptive field) considers the closest neighbor. Subsequent receptive fields consider the mean of the \(16\) closest neighbors when downsampling. The upsampling layers work with the same number of nearest neighbors.
The JSON below corresponds to the described training pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pointmlp_dumean_neck_multictxhead/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "PointMLP",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 96, 128, 192, 256],
"bn": true,
"bn_momentum": 0.90,
"activate": true,
"groups": [4, 4, 4, 4, 4, 4],
"Phi_blocks": [2, 2, 2, 2, 2, 2],
"Phi_residual_expansion": [2, 2, 2, 2, 2, 2],
"Phi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Phi_regularizer": [null, null, null, null, null, null],
"Phi_constraint": [null, null, null, null, null, null],
"Phi_bn": [true, true, true, true, true, true],
"Phi_bn_momentum": [0.90, 0.90, 0.90, 0.90, 0.90, 0.90],
"Psi_blocks": [2, 2, 2, 2, 2, 2],
"Psi_residual_expansion": [2, 2, 2, 2, 2, 2],
"Psi_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"Psi_regularizer": [null, null, null, null, null, null],
"Psi_constraint": [null, null, null, null, null, null],
"Psi_bn": [true, true, true, true, true, true],
"Psi_bn_momentum": [0.90, 0.90, 0.90, 0.90, 0.90, 0.90]
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.90,
"conv1d": true,
"conv1d_kernel_initializer": "glorot_normal",
"neck":{
"max_depth": 2,
"hidden_channels": [64, 64],
"kernel_initializer": ["glorot_uniform", "glorot_uniform"],
"kernel_regularizer": [null, null],
"kernel_constraint": [null, null],
"bn_momentum": [0.90, 0.90],
"activation": ["relu", "relu"]
},
"output_kernel_initializer": "glorot_normal",
"contextual_head": {
"multihead": true,
"max_depth": 2,
"hidden_channels": [64, 64],
"output_channels": [64, 64],
"bn": [true, true],
"bn_momentum": [0.90, 0.90],
"bn_along_neighbors": [true, true],
"activation": ["relu", "relu"],
"distance": ["euclidean", "euclidean"],
"ascending_order": [true, true],
"aggregation": ["max", "max"],
"initializer": ["glorot_uniform", "glorot_uniform"],
"regularizer": [null, null],
"constraint": [null, null]
},
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2500,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy",
"f1"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": false,
"show_layer_names": true,
"rankdir": "LR",
"expand_nested": false,
"dpi": 200,
"show_layer_activations": false
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/PointMLP.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The figure below represents the evolution among the many training epochs of the categorical accuracy, the F1-score, the multihead loss function, and the learning rate.
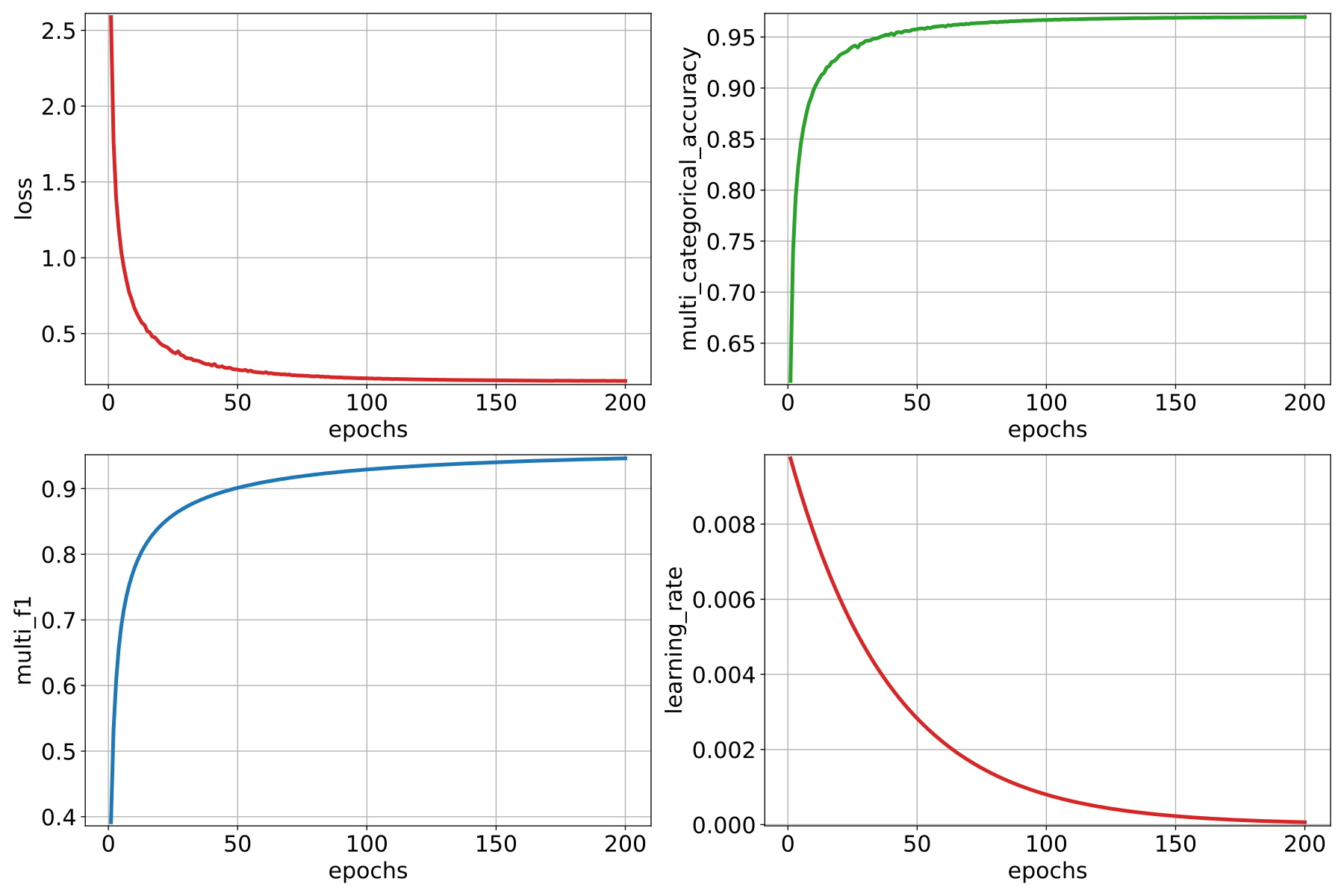
Visualization of the categorical accuracy, the F1-score, the multihead loss, and the learning rate among \(200\) epochs.
Predictive pipeline
The predictive pipeline will use the model on a validation point cloud from the
same dataset and epoch. The predictions will be evaluated through
ClassificationEvaluator and they will be exported together with their
uncertainties through ClassificationUncertaintyEvaluator.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pointmlp_dumean_neck_multictxhead/T1/preds/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/pointmlp_dumean_neck_multictxhead/T1/model/PointMLP.pipe"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"confusion_matrix_normalization_strategy": "row",
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": false,
"include_clusters": false,
"weight_by_predictions": false,
"num_clusters": 0,
"clustering_max_iters": 128,
"clustering_batch_size": 1000000,
"clustering_entropy_weights": false,
"clustering_reduce_function": null,
"gaussian_kernel_points": 256,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
The table below represents the global evaluation metrics. It shows the overall accuracy (OA), precision (P), recall (R), F1-score (F1), intersection over union (IoU), all of them weighted by the number of points, the Matthew’s correlation coefficient (MCC), and the Cohen’s Kappa score (Kappa).
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
84.191 |
75.574 |
55.031 |
58.040 |
46.434 |
83.849 |
84.191 |
82.553 |
73.539 |
80.456 |
80.280 |
The figure below shows the reference and predicted labels, the class ambiguity as a point-wise uncertainty measurement, and the binary error mask (gray for correctly classified points, red for misclassified ones).
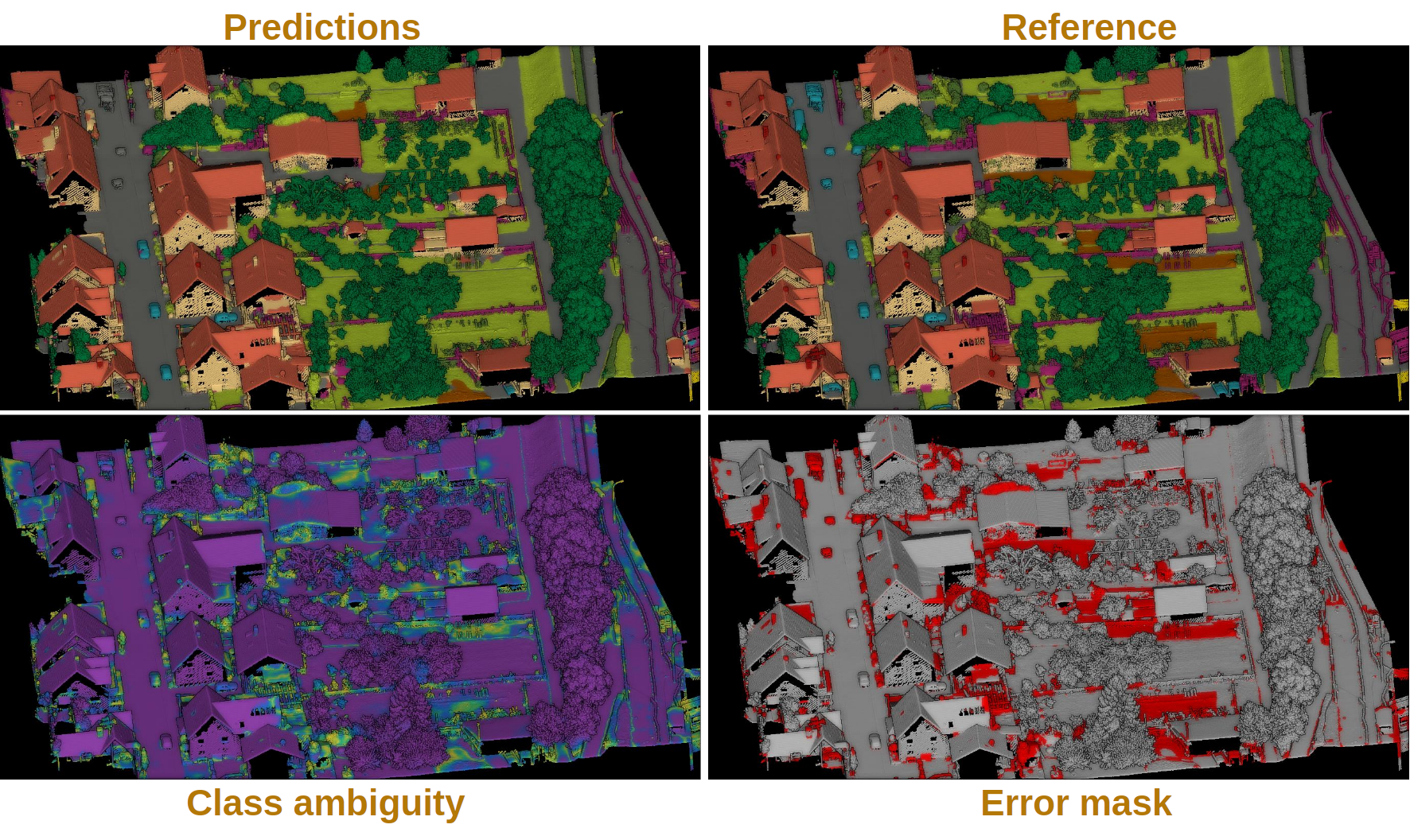
Visualization of the semantic segmentation model applied to previously unseen data. The bottom-right image shows correctly classified points in gray and misclassified points in red. The predictions and reference image use the same color code for the classes. The class ambiguity is represented with purple color for low-uncertainty regions and yellow for high-uncertainty ones.
KPConvX-based model
This example shows how to define two different pipelines, one to train a
KPCovnX-based model (see
Hierarchical KPConvX documentation)
and export it as a PredictivePipeline, the other to use the predictive
pipeline to compute a semantic segmentation on a previously unseen point cloud.
Readers are referred to the
pipelines documentation to read more about how pipelines
work and to see more examples.
Training pipeline
The training pipeline will train a ConvAutoencPwiseClassif for the
multiclass semantic segmentation of the points. The training point cloud is
generated from the March 2018 training point cloud in the
Hessigheim dataset
by transforming the RGB color components to its HSV representation with
HSV from RGB miner.
The pre-processing strategy computes \(25,000\) receptive fields with \(4096\) points at the first depth taken from a spherical neighborhood with a radius of \(5\) meters. It uses an oversampling strategy based on nearest neighbors to puplate receptive fields with not enough points.
The first downsampling (i.e., the one that maps the original input neighborhood to the first receptive field) considers the closest neighbor. Subsequent receptive fields consider the mean of the \(16\) closest neighbors when downsampling. The upsampling layers work with the same number of nearest neighbors.
Note that the neighborhoods are configured in a different way than usual. In
general this example is further from the original KPConvX architecture compared
to the one in the
Hierarchical KPConvX documentation.
Another important difference is the lack of KPConvXLayer elements in
the decoding stages.
The JSON below corresponds to the described training pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpconvx_dumean_neck/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "KPConvX",
"kpconv":{
"feature_space_dims": 64,
"sigma": 5.0,
"kernel_radius": 5.0,
"num_kernel_points": 17,
"deformable": false,
"W_initializer": "he_uniform",
"W_regularizer": null,
"W_constraint": null,
"bn": true,
"bn_momentum": 0.90,
"activate": true
},
"operations_per_depth": [1, 1, 1, 1, 1],
"blocks": [3, 3, 9, 12, 3],
"feature_space_dims": [64, 96, 128, 192, 256],
"hidden_feature_space_dims": [256, 384, 512, 768, 1024],
"sigma": [5.0, 5.0, 5.0, 5.0, 5.0],
"shell_radii": [[0, 2.5, 5.0], [0, 2.5, 5.0], [0, 2.5, 5.0], [0, 2.5, 5.0], [0, 2.5, 5.0]],
"shell_points": [[1, 14, 28], [1, 14, 28], [1, 14, 28], [1, 14, 28], [1, 14, 28]],
"bn": [true, true, true, true, true],
"bn_momentum": [0.90, 0.90, 0.90, 0.90, 0.90],
"activate": [true, true, true, true, true],
"groups": [8, 8, 8, 8, 8],
"deformable": [false, false, false, false, false],
"initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"regularizer": [null, null, null, null, null],
"constraint": [null, null, null, null, null]
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.90,
"conv1d": true,
"conv1d_kernel_initializer": "he_uniform",
"neck":{
"max_depth": 2,
"hidden_channels": [64, 64],
"kernel_initializer": ["he_uniform", "he_uniform"],
"kernel_regularizer": [null, null],
"kernel_constraint": [null, null],
"bn_momentum": [0.90, 0.90],
"activation": ["relu", "relu"]
},
"output_kernel_initializer": "he_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "AdamW",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2500,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy",
"f1"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/KPConvX.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The figure below represents the evolution among the many training epochs of the categorical accuracy, the F1-score, the loss function, and the learning rate.
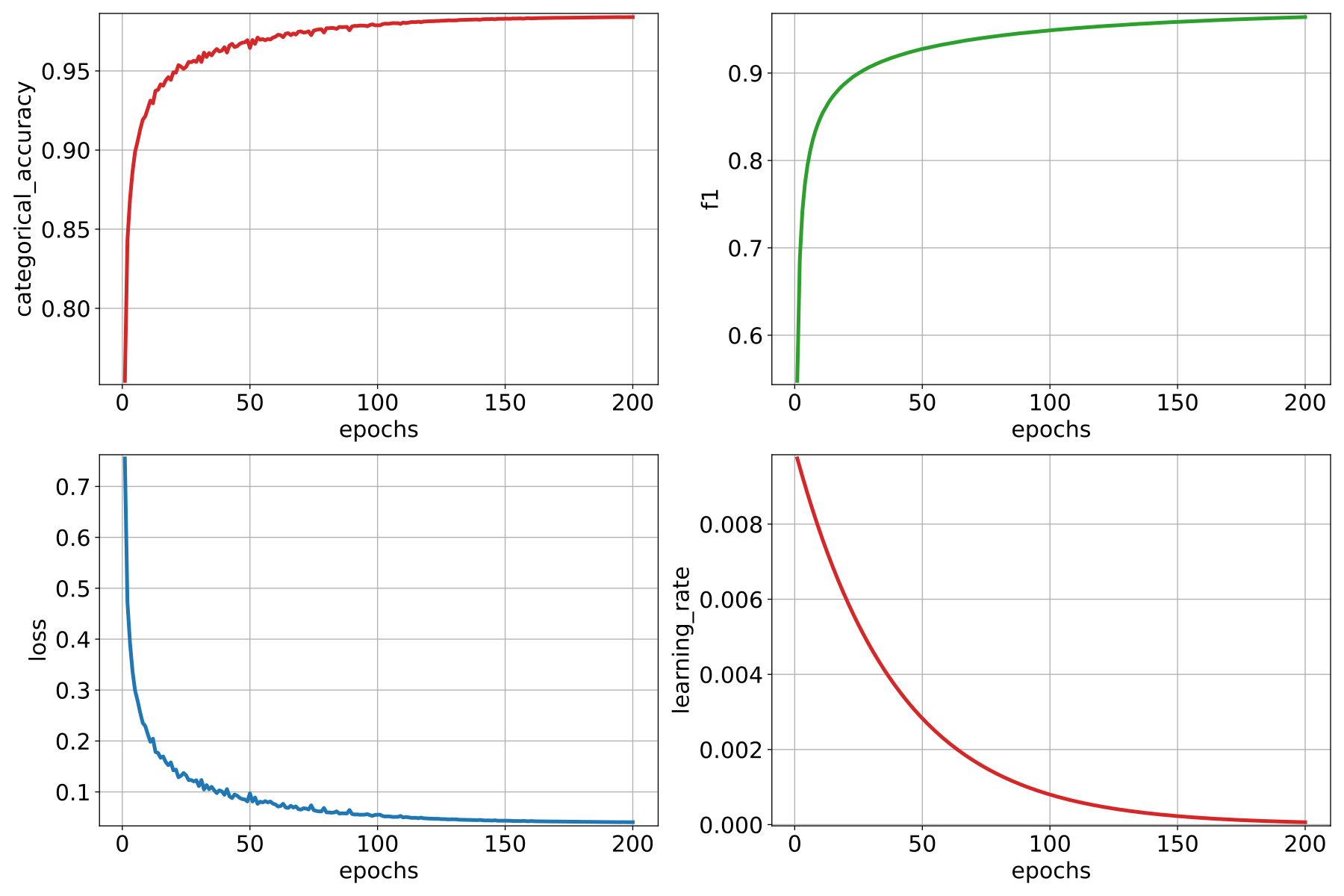
Visualization of the categorical accuracy, the F1-score, the loss, and the learning rate among \(200\) epochs.
Predictive pipeline
The predictive pipeline will use the model on a validation point cloud from the
same dataset and epoch. The predictions will be evaluated through
ClassificationEvaluator and they will be exported together with their
uncertainties through ClassificationUncertaintyEvaluator.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpconvx_dumean_neck/T1/preds/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpconvx_dumean_neck/T1/model/KPConvX.pipe"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"confusion_matrix_normalization_strategy": "row",
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": false,
"include_clusters": false,
"weight_by_predictions": false,
"num_clusters": 0,
"clustering_max_iters": 0,
"clustering_batch_size": 0,
"clustering_entropy_weights": false,
"clustering_reduce_function": null,
"gaussian_kernel_points": 256,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
The table below represents the global evaluation metrics. It shows the overall accuracy (OA), precision (P), recall (R), F1-score (F1), intersection over union (IoU), all of them weighted by the number of points, the Matthew’s correlation coefficient (MCC), and the Cohen’s Kappa score (Kappa).
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
87.368 |
82.448 |
69.158 |
73.272 |
61.322 |
86.719 |
87.368 |
86.563 |
78.426 |
84.346 |
84.294 |
The figure below shows the reference and predicted labels, the class ambiguity as a point-wise uncertainty measurement, and the binary error mask (gray for correctly classified points, red for misclassified ones).
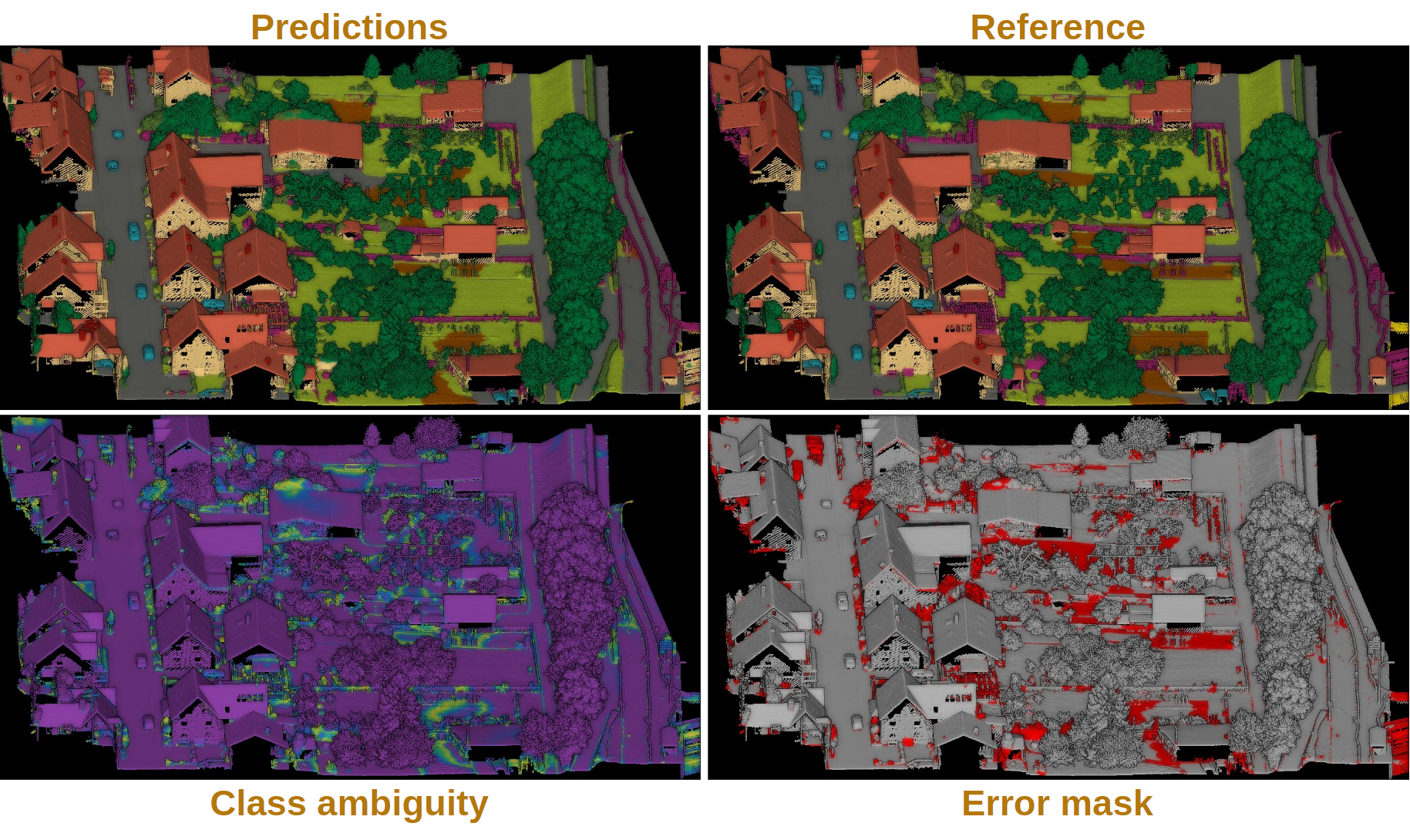
Visualization of the semantic segmentation model applied to previously unseen data. The bottom-right image shows correctly classified points in gray and misclassified points in red. The predictions and reference images use the same color code for the classes. The class ambiguity is represented with purple color for low-uncertainty regions and yellow for high-uncertainty ones.
ContextNet-based model
This example shows how to define two different pipelines, one to train a
ContextNet-based model (see
Hierarchical ContextNet documentation)
and export it as a PredictivePipeline, the other to use the predictive
pipeline to compute a semantic segmentation on a previously unseen point cloud.
Readers are referred to the
pipelines documentation to read more about how pipelines
work and to see more examples.
Training pipeline
The training pipeline will train a ConvAutoencPwiseClassif for the
multiclass semantic segmentation of the points. The training point cloud is
generated from the March 2018 training point cloud in the
Hessigheim dataset
by transforming the RGB color components to its HSV representation with
HSV from RGB miner.
The pre-processing strategy computes \(25,000\) receptive fields with \(4096\) points at the first depth taken from a spherical neighborhood with a radius of \(5\) meters. It uses an oversampling strategy based on nearest neighbors to puplate receptive fields with not enough points.
The first downsampling (i.e., the one that maps the original input neighborhood to the first receptive field) considers the closest neighbor. Subsequent receptive fields consider the mean of the \(16\) closest neighbors when downsampling. The upsampling layers work with the same number of nearest neighbors.
Note that this version of ContextNet uses a multihead contextual head.
The JSON below corresponds to the described training pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/contextual_dumean_hourglass_neck_multihead/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"random_seed": null,
"model_args": {
"fnames": ["ones", "HSV_Hrad", "HSV_S", "HSV_V"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fpspp",
"support_strategy_num_points": 25000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_strategy_fast": 2,
"min_distance": 0.03,
"receptive_field_oversampling": {
"min_points": 2,
"strategy": "nearest",
"k": 3,
"radius": 0.5
},
"center_on_pcloud": true,
"training_class_distribution": [2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250, 2250],
"neighborhood": {
"type": "sphere",
"radius": 5.0,
"separation_factor": 0.8
},
"num_points_per_depth": [4096, 1024, 256, 64, 16],
"fast_flag_per_depth": [4, 4, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": -1,
"training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": null,
"receptive_fields_dir": null,
"training_support_points_report_path": null,
"support_points_report_path": null
},
"feature_extraction": {
"type": "Contextual",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 96, 128, 192, 256],
"hidden_channels": [128, 128, 192, 256, 384, 512],
"bn": [true, true, true, true, true, true],
"bn_momentum": [0.95, 0.95, 0.95, 0.95, 0.95, 0.95],
"bn_along_neighbors": [true, true, true, true, true, true],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"distance": ["euclidean", "euclidean", "euclidean", "euclidean", "euclidean", "euclidean"],
"ascending_order": [true, true, true, true, true, true],
"aggregation": ["mean", "mean", "mean", "mean", "mean", "mean"],
"initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"regularizer": [null, null, null, null, null, null],
"constraint": [null, null, null, null, null, null],
"activate": true,
"hourglass_wrapper": {
"internal_dim": [2, 2, 4, 16, 32, 64],
"parallel_internal_dim": [8, 8, 16, 32, 64, 128],
"activation": ["relu", "relu", "relu", "relu", "relu", "relu"],
"activation2": [null, null, null, null, null, null],
"regularize": [true, true, true, true, true, true],
"W1_initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"W1_regularizer": [null, null, null, null, null, null],
"W1_constraint": [null, null, null, null, null, null],
"W2_initializer": ["he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform", "he_uniform"],
"W2_regularizer": [null, null, null, null, null, null],
"W2_constraint": [null, null, null, null, null, null],
"loss_factor": 0.1,
"subspace_factor": 0.125,
"feature_dim_divisor": 4,
"bn": false,
"bn_momentum": 0.95,
"out_bn": true,
"out_bn_momentum": 0.95,
"out_activation": "relu"
}
},
"features_alignment": null,
"downsampling_filter": "mean",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.95,
"upsampling_hourglass": {
"activation": "relu",
"activation2": null,
"regularize": true,
"W1_initializer": "he_uniform",
"W1_regularizer": null,
"W1_constraint": null,
"W2_initializer": "he_uniform",
"W2_regularizer": null,
"W2_constraint": null,
"loss_factor": 0.1,
"subspace_factor": 0.125
},
"conv1d": false,
"conv1d_kernel_initializer": "he_uniform",
"neck":{
"max_depth": 2,
"hidden_channels": [64, 64],
"kernel_initializer": ["he_uniform", "he_uniform"],
"kernel_regularizer": [null, null],
"kernel_constraint": [null, null],
"bn_momentum": [0.95, 0.95],
"activation": ["relu", "relu"]
},
"contextual_head": {
"multihead": true,
"max_depth": 2,
"hidden_channels": [64, 64],
"output_channels": [64, 64],
"bn": [true, true],
"bn_momentum": [0.95, 0.95],
"bn_along_neighbors": [true, true],
"activation": ["relu", "relu"],
"distance": ["euclidean", "euclidean"],
"ascending_order": [true, true],
"aggregation": ["mean", "mean"],
"initializer": ["he_uniform", "he_uniform"],
"regularizer": [null, null],
"constraint": [null, null]
},
"output_kernel_initializer": "he_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.985,
"end": 1.015
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.0033
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "AdamW",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 2500,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy",
"f1"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": false,
"show_layer_names": true,
"rankdir": "LR",
"expand_nested": false,
"dpi": 300,
"show_layer_activations": false
}
},
"autoval_metrics": null,
"training_evaluation_metrics": null,
"training_class_evaluation_metrics": null,
"training_evaluation_report_path": null,
"training_class_evaluation_report_path": null,
"training_confusion_matrix_report_path": null,
"training_confusion_matrix_plot_path": null,
"training_class_distribution_report_path": null,
"training_class_distribution_plot_path": null,
"training_classified_point_cloud_path": null,
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*/model/ContextNet.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": false,
"include_clustering": false,
"ignore_predictions": false
}
]
}
The figure below represents the evolution among the many training epochs of the categorical accuracy, the F1-score, the loss function, and the learning rate.
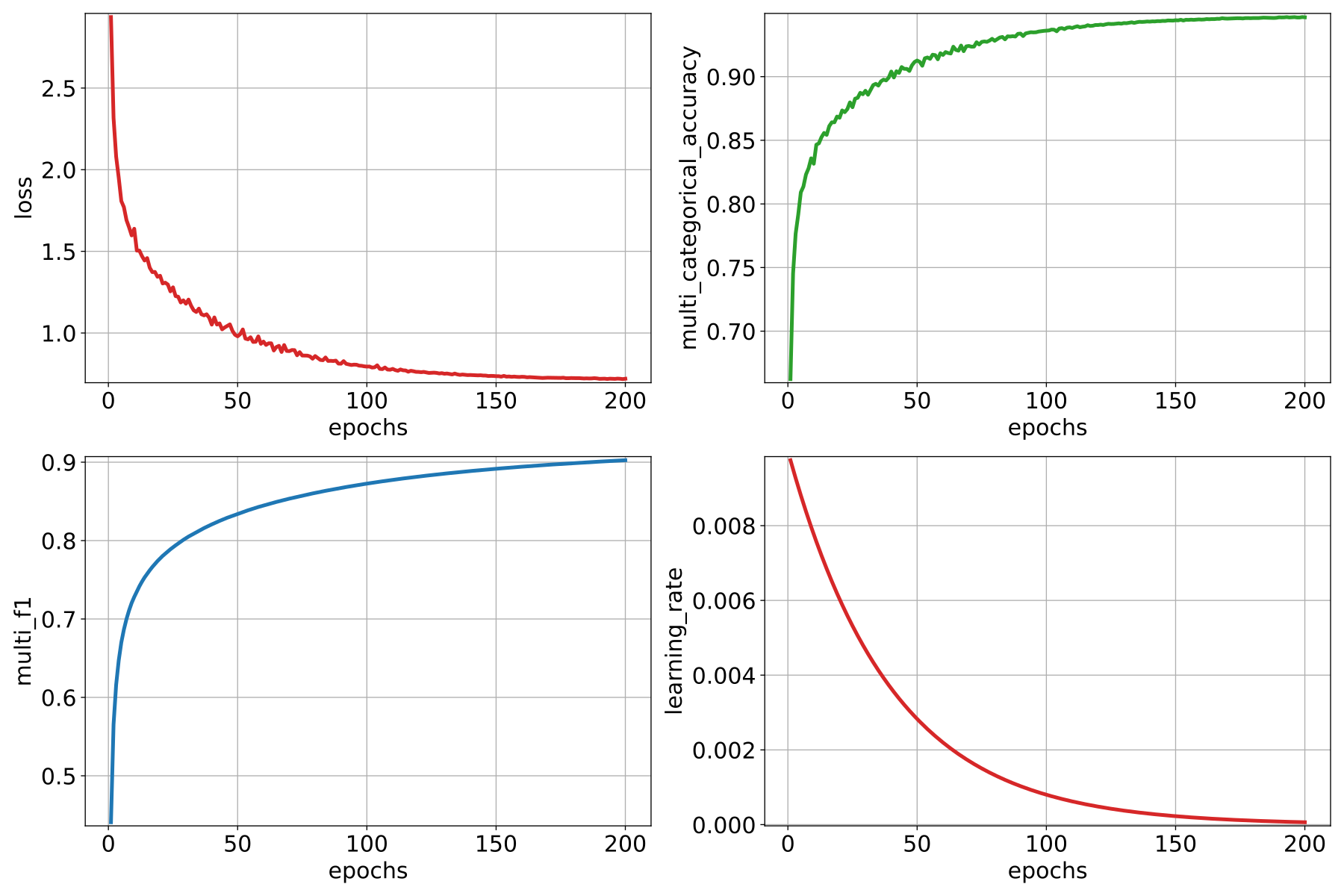
Visualization of the categorical accuracy, the F1-score, the multi-head loss, and the learning rate among \(200\) epochs.
Predictive pipeline
The predictive pipeline will use the model on a validation point cloud from the
same dataset and epoch. The predictions will be evaluated through
ClassificationEvaluator and they will be exported together with their
uncertainties through ClassificationUncertaintyEvaluator.
The JSON below corresponds to the described predictive pipeline.
{
"in_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/contextual_dumean_hourglass_neck_multihead/T1/preds/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/ext4/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/contextual_dumean_hourglass_neck_multihead/T1/model/ContextNet.pipe"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"confusion_matrix_normalization_strategy": "row",
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_normalization_strategy": "row",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": false,
"include_clusters": false,
"weight_by_predictions": false,
"num_clusters": 0,
"clustering_max_iters": 0,
"clustering_batch_size": 0,
"clustering_entropy_weights": false,
"clustering_reduce_function": null,
"gaussian_kernel_points": 256,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
The table below represents the global evaluation metrics. It shows the overall accuracy (OA), precision (P), recall (R), F1-score (F1), the intersection over union (IoU), all of them weighted by the number of points, the Matthew’s correlation coefficient (MCC), and the Cohen’s Kappa score (Kappa).
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
87.117 |
80.441 |
71.620 |
74.739 |
62.081 |
86.841 |
87.117 |
86.689 |
78.125 |
84.066 |
84.019 |
The figure below shows the reference and predicted labels, the class ambiguity as a point-wise uncertainty measurement, and the binary error mask (gray for correctly classified points, red for misclassified ones).
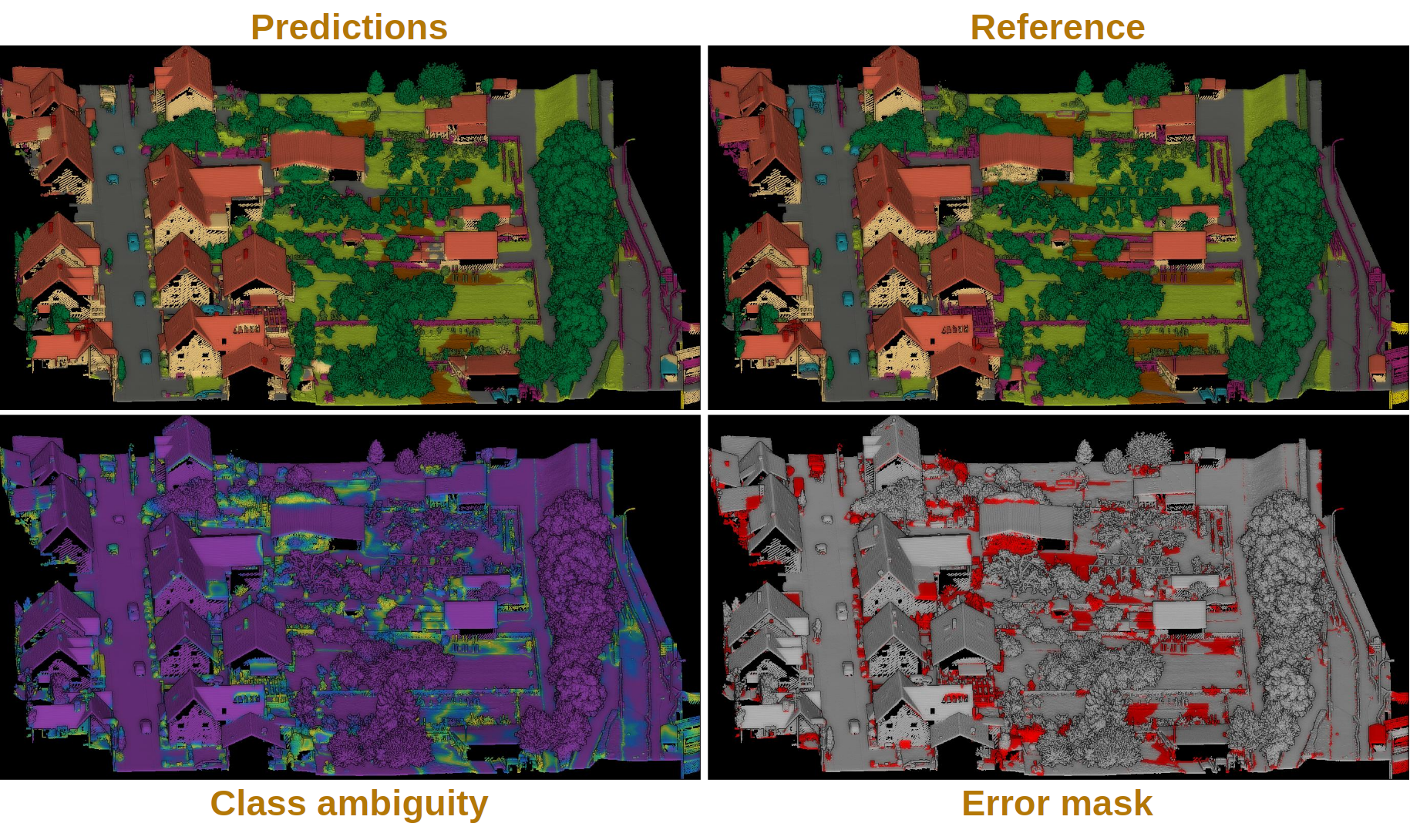
Visualization of the semantic segmentation model applied to previously unseen data. The bottom-right image shows correctly classified points in gray and misclassified points in red. The predictions and reference images use the same color code for the classes. The class ambiguity is represented with purple color for low-uncertainty regions and yellow for high-uncertainty ones.