KPConv-like model for point-wise classification in the Hessigheim March2018 dataset
Data
The point clouds used in this example are available in the official webpage of the dataset. As this example is part of a more thorough analysis, the point clouds were preprocessed to transform the color components from RGB to HSV (see HSV from RGB miner documentation). The JSONs are available in spec/demo/kpconv_hessig_2018 with file names hsv_std_mine_start_pipeline.json and hsv_std_mine_continue_pipeline.json, respectively. Note, however, that only the \((x, y, z)\) coordinates are considered in this example, i.e., the color components are not considered by the model.
JSON
Apart from the two previously mentioned JSON files to preprocess the data, four JSON files are introduced here. Two are used for training the model in two consecutive training processes, and two are used to compute predictions with the model and evaluate them. All the JSONs to reproduce this example can be found in the spec/demo/kpconv_hessig_2018 folder of the VL3D++ framework.
First training process JSON
The JSON below can be used to training a KPConv-like model for the first time on the training point cloud of the March2018 Hessigheim dataset. Note that the paths to the files might need an update to fit your local file system.
{
"in_pcloud": [
"/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpc_ATRY7/T1/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"fnames": ["ones"],
"random_seed": null,
"model_args": {
"fnames": ["ones"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 45000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 5000,
"support_strategy_fast": true,
"center_on_pcloud": true,
"_training_class_distribution": [32, 0, 32, 0, 32, 32, 0, 32, 0, 0, 32],
"neighborhood": {
"type": "sphere",
"radius": 3.0,
"separation_factor": 0.8
},
"num_points_per_depth": [512, 256, 128, 64, 32],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"_training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"_training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": "*/training_eval/training_receptive_fields/",
"training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"_receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"_receptive_fields_distribution_plot_path": null,
"_receptive_fields_dir": "*/training_eval/receptive_fields/",
"receptive_fields_dir": null,
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"feature_extraction": {
"type": "KPConv",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.98,
"activate": true,
"sigma": [3.0, 3.0, 3.75, 4.5, 5.25, 6.0],
"kernel_radius": [3.0, 3.0, 3.0, 3.0, 3.0, 3.0],
"num_kernel_points": [15, 15, 15, 15, 15, 15],
"deformable": [false, false, false, false, false, false],
"W_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W_regularizer": [null, null, null, null, null, null],
"W_constraint": [null, null, null, null, null, null],
"unary_convolution_wrapper": {
"activation": "relu",
"initializer": "glorot_uniform",
"bn": true,
"bn_momentum": 0.98
}
},
"_structure_alignment": {
"tnet_pre_filters_spec": [64, 128, 256],
"tnet_post_filters_spec": [128, 64, 32],
"kernel_initializer": "glorot_normal"
},
"features_alignment": null,
"downsampling_filter": "strided_kpconv",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"_features_structuring_representation_dir": "*/training_eval/feat_struct_layer/",
"kpconv_representation_dir": "*/training_eval/kpconv_layers/",
"skpconv_representation_dir": "*/training_eval/skpconv_layers/",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 300,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.99,
"end": 1.01
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.001
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-2,
"decay_steps": 10000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"_training_activations_path": "*/training_eval/activations.las",
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*pipe/KPC_T1.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": true
}
]
}
Second training process JSON
After the first training process, we have a trained model. With the JSON below, we randomly select another set of 45,000 neighborhoods to train the model one more time. Note that the initial learning rate is smaller (\(10^{-3}\) instead of \(10^{-2}\)), the steps for the learning rate decay have been increased, and the number of epochs has been reduced. These changes in the optimization process aim to keep what has been learnt by the model while updating it with a different perspective from the same training point cloud.
{
"in_pcloud": [
"/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_train_hsv_std.laz"
],
"out_pcloud": [
"/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpc_ATRY7/T2/*"
],
"sequential_pipeline": [
{
"train": "ConvolutionalAutoencoderPwiseClassifier",
"training_type": "base",
"pretrained_model": "/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpc_ATRY7/T1/pipe/KPC_T1.model",
"fnames": ["ones"],
"random_seed": null,
"model_args": {
"fnames": ["ones"],
"num_classes": 11,
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"pre_processing": {
"pre_processor": "hierarchical_fps",
"support_strategy_num_points": 45000,
"to_unit_sphere": false,
"support_strategy": "fps",
"support_chunk_size": 5000,
"support_strategy_fast": true,
"center_on_pcloud": true,
"_training_class_distribution": [32, 0, 32, 0, 32, 32, 0, 32, 0, 0, 32],
"neighborhood": {
"type": "sphere",
"radius": 3.0,
"separation_factor": 0.8
},
"num_points_per_depth": [512, 256, 128, 64, 32],
"fast_flag_per_depth": [false, false, false, false, false],
"num_downsampling_neighbors": [1, 16, 16, 16, 16],
"num_pwise_neighbors": [16, 16, 16, 16, 16],
"num_upsampling_neighbors": [1, 16, 16, 16, 16],
"nthreads": 12,
"training_receptive_fields_distribution_report_path": "*/training_eval/training_receptive_fields_distribution.log",
"_training_receptive_fields_distribution_report_path": null,
"training_receptive_fields_distribution_plot_path": "*/training_eval/training_receptive_fields_distribution.svg",
"_training_receptive_fields_distribution_plot_path": null,
"training_receptive_fields_dir": "*/training_eval/training_receptive_fields/",
"_training_receptive_fields_dir": null,
"receptive_fields_distribution_report_path": "*/training_eval/receptive_fields_distribution.log",
"_receptive_fields_distribution_report_path": null,
"receptive_fields_distribution_plot_path": "*/training_eval/receptive_fields_distribution.svg",
"_receptive_fields_distribution_plot_path": null,
"_receptive_fields_dir": "*/training_eval/receptive_fields/",
"receptive_fields_dir": null,
"training_support_points_report_path": "*/training_eval/training_support_points.las",
"support_points_report_path": "*/training_eval/support_points.las"
},
"feature_extraction": {
"type": "KPConv",
"operations_per_depth": [2, 1, 1, 1, 1],
"feature_space_dims": [64, 64, 128, 256, 512, 1024],
"bn": true,
"bn_momentum": 0.98,
"activate": true,
"sigma": [3.0, 3.0, 3.75, 4.5, 5.25, 6.0],
"kernel_radius": [3.0, 3.0, 3.0, 3.0, 3.0, 3.0],
"num_kernel_points": [15, 15, 15, 15, 15, 15],
"deformable": [false, false, false, false, false, false],
"W_initializer": ["glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform", "glorot_uniform"],
"W_regularizer": [null, null, null, null, null, null],
"W_constraint": [null, null, null, null, null, null],
"unary_convolution_wrapper": {
"activation": "relu",
"initializer": "glorot_uniform",
"bn": true,
"bn_momentum": 0.98
}
},
"_structure_alignment": {
"tnet_pre_filters_spec": [64, 128, 256],
"tnet_post_filters_spec": [128, 64, 32],
"kernel_initializer": "glorot_normal"
},
"features_alignment": null,
"downsampling_filter": "strided_kpconv",
"upsampling_filter": "mean",
"upsampling_bn": true,
"upsampling_momentum": 0.98,
"conv1d_kernel_initializer": "glorot_normal",
"output_kernel_initializer": "glorot_normal",
"model_handling": {
"summary_report_path": "*/model_summary.log",
"training_history_dir": "*/training_eval/history",
"_features_structuring_representation_dir": "*/training_eval/feat_struct_layer/",
"kpconv_representation_dir": "*/training_eval/kpconv_layers/",
"skpconv_representation_dir": "*/training_eval/skpconv_layers/",
"class_weight": [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0],
"training_epochs": 200,
"batch_size": 16,
"training_sequencer": {
"type": "DLSequencer",
"random_shuffle_indices": true,
"augmentor": {
"transformations": [
{
"type": "Rotation",
"axis": [0, 0, 1],
"angle_distribution": {
"type": "uniform",
"start": -3.141592,
"end": 3.141592
}
},
{
"type": "Scale",
"scale_distribution": {
"type": "uniform",
"start": 0.99,
"end": 1.01
}
},
{
"type": "Jitter",
"noise_distribution": {
"type": "normal",
"mean": 0,
"stdev": 0.001
}
}
]
}
},
"prediction_reducer": {
"reduce_strategy" : {
"type": "MeanPredReduceStrategy"
},
"select_strategy": {
"type": "ArgMaxPredSelectStrategy"
}
},
"checkpoint_path": "*/checkpoint.weights.h5",
"checkpoint_monitor": "loss",
"learning_rate_on_plateau": {
"monitor": "loss",
"mode": "min",
"factor": 0.1,
"patience": 2000,
"cooldown": 5,
"min_delta": 0.01,
"min_lr": 1e-6
}
},
"compilation_args": {
"optimizer": {
"algorithm": "Adam",
"learning_rate": {
"schedule": "exponential_decay",
"schedule_args": {
"initial_learning_rate": 1e-3,
"decay_steps": 15000,
"decay_rate": 0.96,
"staircase": false
}
}
},
"loss": {
"function": "class_weighted_categorical_crossentropy"
},
"metrics": [
"categorical_accuracy"
]
},
"architecture_graph_path": "*/model_graph.png",
"architecture_graph_args": {
"show_shapes": true,
"show_dtype": true,
"show_layer_names": true,
"rankdir": "TB",
"expand_nested": true,
"dpi": 300,
"show_layer_activations": true
}
},
"autoval_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_evaluation_metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"training_class_evaluation_metrics": ["P", "R", "F1", "IoU"],
"training_evaluation_report_path": "*/training_eval/evaluation.log",
"training_class_evaluation_report_path": "*/training_eval/class_evaluation.log",
"training_confusion_matrix_report_path": "*/training_eval/confusion.log",
"training_confusion_matrix_plot_path": "*/training_eval/confusion.svg",
"training_class_distribution_report_path": "*/training_eval/class_distribution.log",
"training_class_distribution_plot_path": "*/training_eval/class_distribution.svg",
"training_classified_point_cloud_path": "*/training_eval/classified_point_cloud.las",
"_training_activations_path": "*/training_eval/activations.las",
"training_activations_path": null
},
{
"writer": "PredictivePipelineWriter",
"out_pipeline": "*pipe/KPC_T2.pipe",
"include_writer": false,
"include_imputer": true,
"include_feature_transformer": true,
"include_miner": true,
"include_class_transformer": true
}
]
}
Predictions after the first training process JSON
The JSON below can be used to classify the validation point cloud with the model after the first training process. It also computes the evaluation of the model and the uncertainty assessment.
{
"in_pcloud": [
"/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpc_ATRY7/T1/preds/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpc_ATRY7/T1/pipe/KPC_T1.pipe"
},
{
"writer": "ClassifiedPcloudWriter",
"out_pcloud": "*predicted.las"
},
{
"writer": "PredictionsWriter",
"out_preds": "*predictions.lbl"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": true,
"include_clusters": true,
"weight_by_predictions": false,
"num_clusters": 10,
"clustering_max_iters": 128,
"clustering_batch_size": 1000000,
"clustering_entropy_weights": false,
"clustering_reduce_function": "mean",
"gaussian_kernel_points": 256,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
Predictions after the second training process JSON
The JSON below can be used to classify the validation point cloud with the model after the second training process. It also computes the evaluation of the model and the uncertainty assessment.
{
"in_pcloud": [
"/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/mined/Mar18_val_hsv_std.laz"
],
"out_pcloud": [
"/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpc_ATRY7/T2/preds/*"
],
"sequential_pipeline": [
{
"predict": "PredictivePipeline",
"model_path": "/hei/Hessigheim_Benchmark/Epoch_March2018/vl3d/out/kpc_ATRY7/T2/pipe/KPC_T2.pipe"
},
{
"writer": "ClassifiedPcloudWriter",
"out_pcloud": "*predicted.las"
},
{
"writer": "PredictionsWriter",
"out_preds": "*predictions.lbl"
},
{
"eval": "ClassificationEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"metrics": ["OA", "P", "R", "F1", "IoU", "wP", "wR", "wF1", "wIoU", "MCC", "Kappa"],
"class_metrics": ["P", "R", "F1", "IoU"],
"report_path": "*report/global_eval.log",
"class_report_path": "*report/class_eval.log",
"confusion_matrix_report_path" : "*report/confusion_matrix.log",
"confusion_matrix_plot_path" : "*plot/confusion_matrix.svg",
"class_distribution_report_path": "*report/class_distribution.log",
"class_distribution_plot_path": "*plot/class_distribution.svg"
},
{
"eval": "ClassificationUncertaintyEvaluator",
"class_names": ["LowVeg", "ImpSurf", "Vehicle", "UrbanFurni", "Roof", "Facade", "Shrub", "Tree", "Soil/Gravel", "VertSurf", "Chimney"],
"include_probabilities": true,
"include_weighted_entropy": true,
"include_clusters": true,
"weight_by_predictions": false,
"num_clusters": 10,
"clustering_max_iters": 128,
"clustering_batch_size": 1000000,
"clustering_entropy_weights": false,
"clustering_reduce_function": "mean",
"gaussian_kernel_points": 256,
"report_path": "*uncertainty/uncertainty.las",
"plot_path": "*uncertainty/"
}
]
}
Quantification
Global results
The table below shows the global evaluation metrics for the model after the first training process on the validation point cloud.
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
82.667 |
75.316 |
62.810 |
66.184 |
54.249 |
82.292 |
82.667 |
81.839 |
72.515 |
78.569 |
78.439 |
The table below shows the global evaluation metrics for the model after the second training process on the validation point cloud.
OA |
P |
R |
F1 |
IoU |
wP |
wR |
wF1 |
wIoU |
MCC |
Kappa |
|---|---|---|---|---|---|---|---|---|---|---|
86.726 |
79.879 |
70.100 |
73.564 |
62.039 |
85.623 |
86.726 |
85.809 |
77.773 |
83.557 |
83.476 |
Class-wise results
The table below shows the class-wise evaluation metrics for the model after the first training process on the validation point cloud.
CLASS |
P |
R |
F1 |
IoU |
|---|---|---|---|---|
LowVeg |
75.408 |
87.683 |
81.083 |
68.185 |
ImpSurf |
89.777 |
83.559 |
86.556 |
76.299 |
Vehicle |
95.324 |
33.397 |
49.465 |
32.859 |
UrbanFurni |
48.825 |
45.042 |
46.857 |
30.597 |
Roof |
95.455 |
93.754 |
94.597 |
89.747 |
Facade |
67.574 |
83.656 |
74.760 |
59.694 |
Shrub |
69.743 |
25.673 |
37.531 |
23.100 |
Tree |
93.329 |
97.261 |
95.254 |
90.939 |
Soil/Gravel |
17.608 |
12.704 |
14.760 |
7.968 |
VertSurf |
87.605 |
74.462 |
80.501 |
67.365 |
Chimney |
87.827 |
53.713 |
66.659 |
49.991 |
The table below shows the class-wise evaluation metrics for the model after the second training process on the validation point cloud.
CLASS |
P |
R |
F1 |
IoU |
|---|---|---|---|---|
LowVeg |
81.739 |
90.849 |
86.054 |
75.521 |
ImpSurf |
89.294 |
91.798 |
90.529 |
82.696 |
Vehicle |
94.984 |
47.166 |
63.032 |
46.019 |
UrbanFurni |
65.333 |
49.835 |
56.541 |
39.413 |
Roof |
96.394 |
94.885 |
95.634 |
91.633 |
Facade |
73.322 |
84.950 |
78.709 |
64.893 |
Shrub |
68.185 |
54.163 |
60.371 |
43.236 |
Tree |
95.051 |
97.286 |
96.155 |
92.595 |
Soil/Gravel |
32.434 |
16.000 |
21.429 |
12.000 |
VertSurf |
92.033 |
68.995 |
78.866 |
65.107 |
Chimney |
89.903 |
75.170 |
81.879 |
69.318 |
Visualization
The figure below shows the results of the model after the second training process on the validation point cloud.
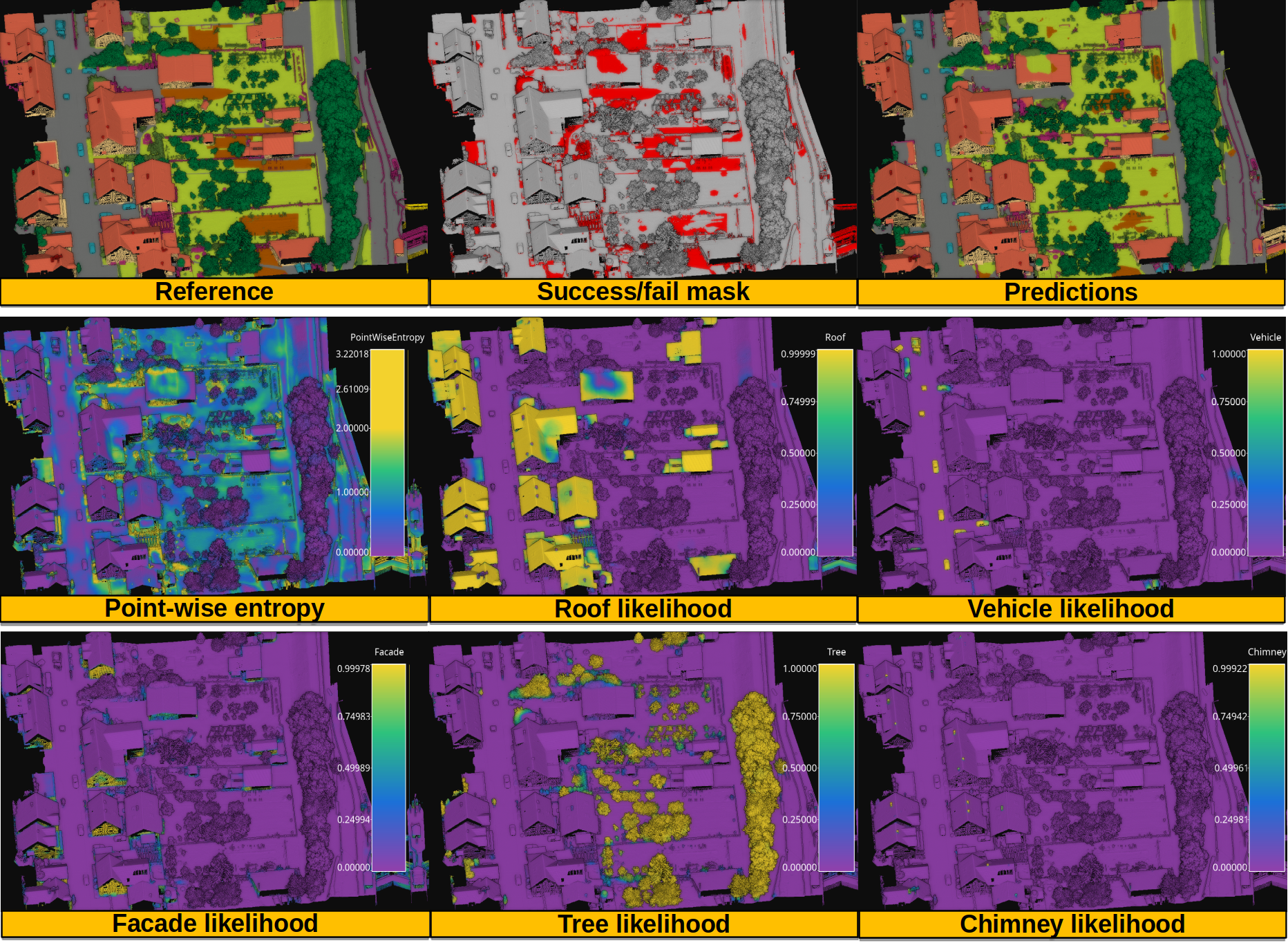
Visualization of the reference and predictions, together with the binary fail/success mask. Also, the point-wise entropy and the likelihood for the roof, vehicle, facade, tree, and chimney classes.
Application
This example has two main applications:
Baseline model for urban semantic segmentation in 3D point clouds with deep learning.
Exploring continue training for deep learning models. In other words, the example illustrates how to train a model in more than one training process. This can be especially helpful when there are many big labeled point clouds so the model can learn how to classify considering different representations of the target classes, potentially improving its generalization.